深度解析:国内首个开源人形机器人青龙核心技术
发表时间: 2024-07-09 20:57
通信世界网消息(CWW)在2024年龙年,一条“青龙”横空出世。7月4日,在世界人工智能大会上,国家地方共建人形机器人创新中心重磅推出全球首个全尺寸开源工版人形机器人——青龙。这款机器人一经问世就得到了广泛的关注。
因为这是全球首款开源人形机器人。这一开创性的举措并非偶然,而是源于对中国科技发展的深刻洞察和对未来的宏伟愿景。这不仅是技术上的突破,更是对科技共享、共同进步理念的坚定践行。
让我们深度了解下青龙背后的成长故事,一起看看这条“青龙”能否掀起行业巨变。

全球首个全尺寸开源工版人形机器人青龙
一、青龙的独特魅力
青龙人形机器人一亮相,就以其独特的设计和强大的性能吸引了众人的目光。
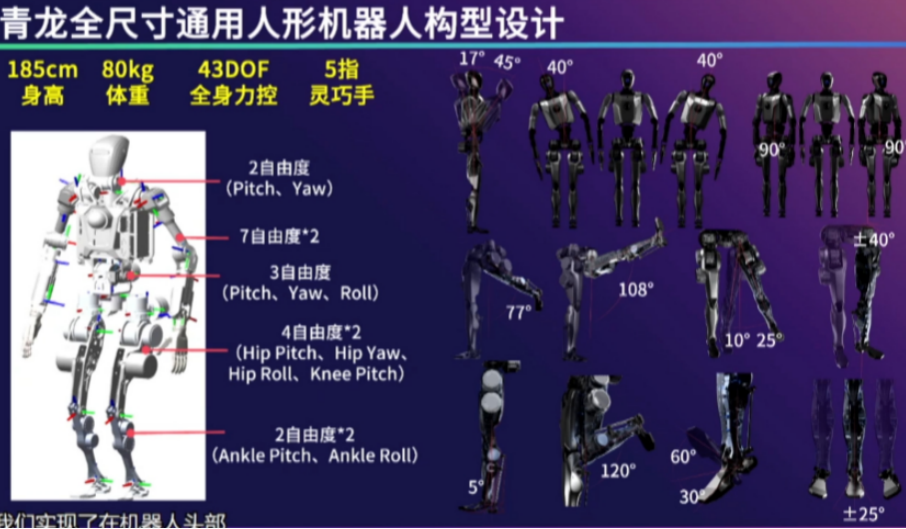
它身高1.85米,体重80千克,整机集成43个主动自由度,在头部、手部、臂部、腿部、腰部和踝部实现了全尺寸的精妙设计。其腿部系统追求轻量化、高刚度和低关联,通过打通从仿生到仿真再到实验验证的正向设计研发流程,实现了双足机器人仿生机构与结构的完美融合。
在动力和电源管理方面,青龙人形机器人搭载了先进的具有能量回收系统和输出稳压管理的电源系统。这一创新设计使得机器人能够在复杂的工况下稳定运行,持续工作3~4个小时,为其在各种场景中的应用提供了坚实的保障。
关键模组作为硬件系统的核心组成部分,更是展现了卓越的性能。整机共搭载了两类10种31个关节,最大关节扭矩高达396牛·米,最大扭矩密度达到200牛·米/公斤。针对不同部位的特定需求,如对激动能力、负载能力和过载能力要求更高的腿足系统,采用了高扭矩密度的轴向电机加低减速比和行动减速器的精准方案;而对于更为关注作业精度和交互特性的上肢,则采用了高功率密度的电机与谐波检测器相结合的SEA方案。
操纵与作业系统的设计同样精妙绝伦。搭载了质量轻、构型巧、负载能力强、作业精度高、大场景比的七自由度机械臂与集成触觉感知能力的五指灵巧手,为后续机器人的模仿学习和智能交互提供了完备的硬件基础。
通讯系统采用多主站实时同步高速移动的总线系统,充分兼顾了模块化和扩展性,使得开发者能够更加便捷地进行二次开发,为机器人的功能拓展和应用创新提供了无限可能。同时,机器人平台搭载了具备400tops的高算力的具身智能控制器,集成丰富的外设接口,平台本体还集成了“视、听、触、嗅、动”五感融合设计,使其能够深度感知周围环境,与外界实现更加自然、智能的交互。
二、智慧大脑:朱雀与玄武
有了出色的身体构造,赋予青龙智慧的大脑成为了关键。为此,创新中心精心打造了朱雀具身大脑和玄武小脑模型。
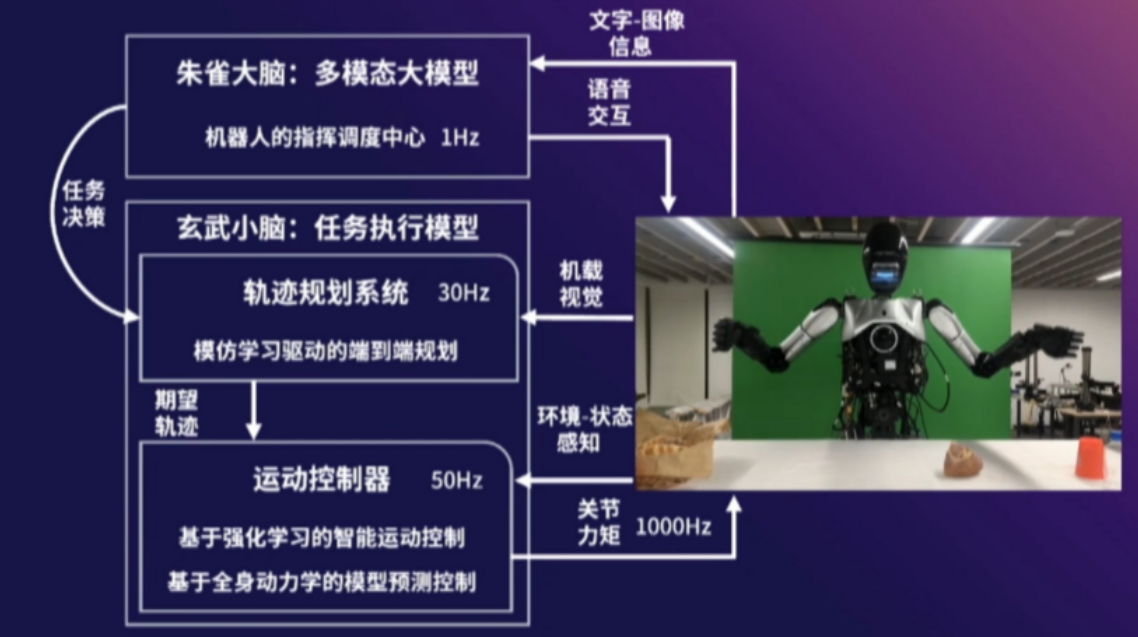
朱雀具身大脑如同一个智能的指挥调度中心,以多模态大模型为核心,能够接收文字信息、图像信息等多种输入,并输出精准的语音交互以及明智的任务决策信息。它凭借强大的感知能力、任务理解能力、记忆能力和规划能力,为人形机器人在复杂环境中独立完成任务提供了可靠的支持。
玄武小脑模型则侧重于具体任务的执行,其中的轨迹规划模块采用端到端模仿学习驱动的方式。以机载视觉作为输入,以人类的作业为模仿对象,精准地输出期待轨迹。而运动控制器方面,创新中心探索了两条技术路径:基于强化学习的智能运动控制方法和基于全身动力学的模型预测控制方法。这两种方法能够根据环境信息以及机器人的状态,高效地完成控制目标,确保机器人的动作准确、稳定。
在朱雀大脑和轨迹规划系统尚未完全成熟的阶段,遥操作系统发挥了重要作用。它作为输入控制机器人完成任务的同时,还能够收集大量有价值的数据,为朱雀大脑和轨迹规划系统的进一步优化和发展提供了丰富的素材。
三、数据训练场:攻克应用难题的关键
人形机器人的发展并非一帆风顺,应用场景的复杂性和高质量数据的获取难度成为了制约其广泛应用的瓶颈。
创新中心敏锐地察觉到这一问题,并积极采取行动,打造了专门的训练场。
通过对整个人形机器人的场景进行技术难度分级,从L1级的固化环境到L4级的完全动态环境,清晰地勾勒出了不同场景下机器人所需具备的能力和面临的挑战。同时,将人形机器人的能力分解为学习能力、运动能力和作业能力,进一步明确了研发和训练的方向。 训练场的架构分为感存算学用五个部分。
在感和存环节,通过云端数据的采集,包括遥操作的数据、音频数据、自然语言、运动捕捉等,并在云端搭建数据存储中心,为后续的计算和学习提供了丰富的数据资源。在算和学环节,专注于机器人的技能模仿学习和强化学习,涵盖单臂、双臂以及全身行为的运动训练,不断提升机器人的智能水平和动作精度。而在“用”的环节,则将训练成果应用于工业产线以及服务等实际场景,实现了人形机器人的第一批模拟应用。
数据训练方法分为三个阶段。首先,通过斯坦福阿罗哈(ALOHA)开源项目,实现了单臂的单技能学习和与作业对象环境的泛化能力。接着,将这一技术路线迁移到青龙人形机器人上肢,进行多技能的学习和训练,使其能够实现多技能的模仿学习。最后,通过大规模的人类作业视频,生成低成本规模化数据集,为机器人的深度学习和优化提供了充足的数据支持。
四、开源造福世界
此次人形机器人的开源可谓划时代的创举。长期以来,全球科技领域的开源项目多由国外主导,中国在人形机器人领域渴望打破这一局面,建立属于自己的全尺寸开源社区。
开源不仅能够汇聚全球智慧,加速技术创新,还能为中国科技在国际舞台上赢得更多的话语权。为此,在创新中心推动下,开源网站Openloong.org.cn应运而生,一个以端到端大模型驱动的人形机器人整机平台正式向世界敞开大门。这一平台的诞生,为广大开发者和科研人员提供了一个自由探索、创新的空间,也为中国人形机器人技术的发展注入了强大的动力。
回顾青龙机器人平台的研发历程,核心技术经过了十余年的深厚沉淀。上海在短短半年时间内,实现了从无到有,从1到10的本质性突破。这一成就离不开创新中心硬件研发团队的不懈努力和开源开放的初心。
相信在不久的将来,青龙人形机器人将在制造业、国家重大战略需求、特种环境和民生服务等领域大放异彩,为人类创造更加便捷、高效、智能的生活。
声明:本站内容部分源于网络转载,出于传递更多信息之目的,并不意味着赞同其观点或证实其描述。文章内容仅供参考,请咨询相关专业人士。
如果无意之中侵犯了您的版权,或有意见、反馈或投诉等情况, 请联系本站,[qq:]
Copyright ©2025 编程密语 All rights reserved 版权所有 鲁ICP备09004228号-12
 鲁公网安备37020202000738号
鲁公网安备37020202000738号