理想发布最新无图NOA系统,自动驾驶再升级
发表时间: 2024-07-05 23:33
本文来源:时代财经 作者:武凯
7月5日晚,理想汽车发布新版无图NOA系统(Navigate On Autopilot),即不依赖高精地图的领航辅助驾驶系统。理想汽车产品高级副总裁范皓宇表示,新版无图NOA系统支持全国道路,适用于理想MEGA以及L系列所有AD Max版本车型,将于7月内推送。

图片来源:时代财经摄
理想汽车也于今日透露了其下一代“端到端”+VLM系统(视觉语言模型)的进展。官方表示,其智能驾驶团队自去年下半年开始研究这一方案,目前已完成了模型的原型验证和实车部署,实际效果超出预期。理想汽车将会在近期开始向测试用户推送“端到端”+VLM系统。
“理想汽车当前的无图NOA,以及下一代‘端到端’+VLM系统,100%均由理想汽车智能驾驶团队自研完成。”理想汽车智能驾驶副总裁郎咸朋表示。
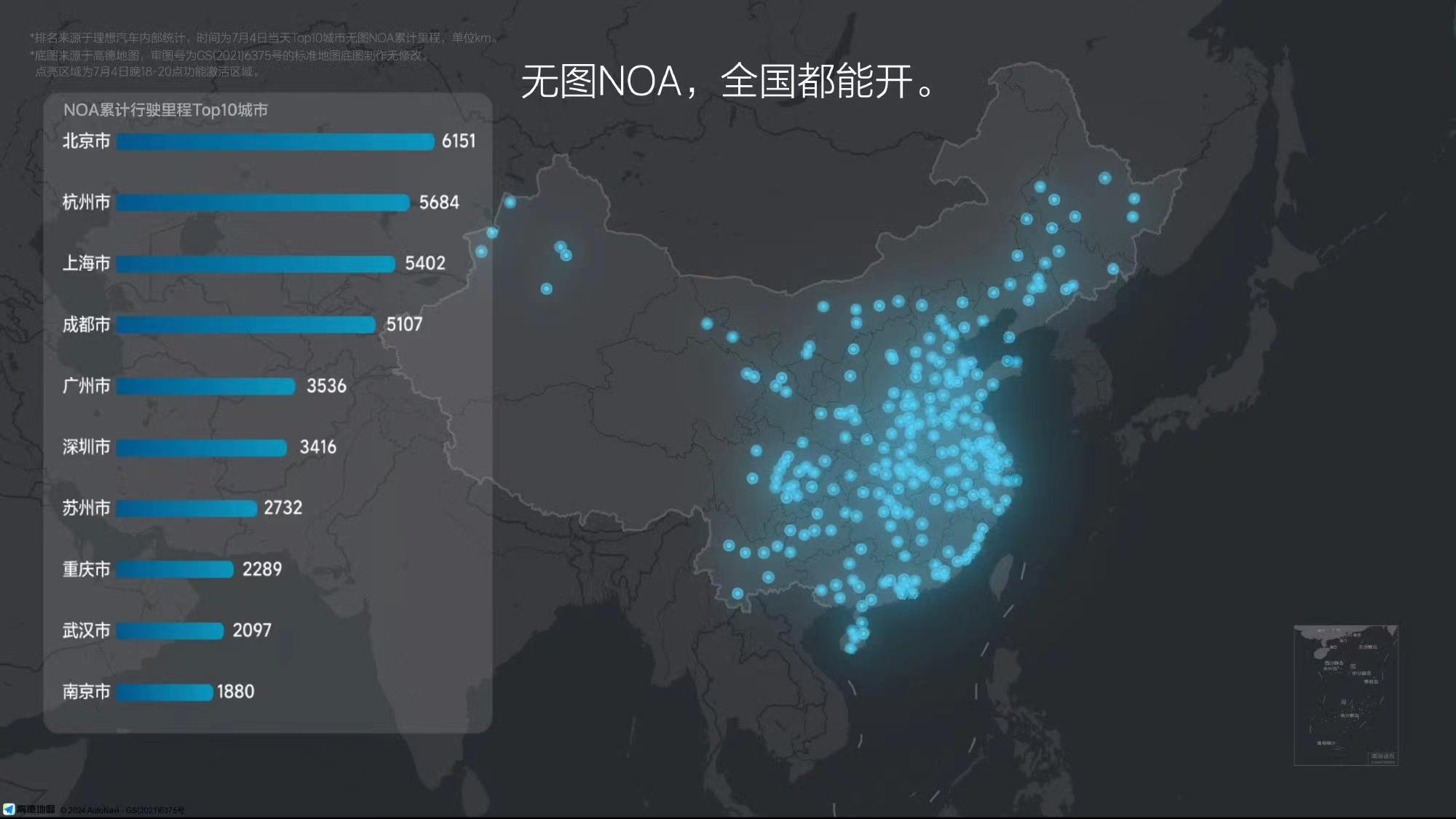
图片来源:理想汽车
无图NOA与“端到端”方案,正是近期自动驾驶领域的两大焦点。
一方面,国内多家车企正在加速推动NOA功能落地。如在今年1月,小鹏汽车宣布其城市辅助驾驶系统已覆盖243座城市;今年4月,蔚来汽车发布全域领航辅助城区功能,称可在全国726座城市实现城区、高速、换电等多种场景的智能驾驶。
在业内看来,依赖高精地图的NOA方案成本较高且难以覆盖较为陌生、复杂的行车场景。因此“轻地图重感知”(即业内“无图”方案)成为发展趋势。多家车企相继推出不依赖高精地图的城市NOA方案。
无图NOA的到来一方面大幅加快城市NOA部署速度、降低成本,同时也让“端到端”的技术方案大受追捧。
另一方面随着特斯拉FSD进入中国市场风声渐近,近期多家车企被曝调整自动驾驶部门或技术路线,小鹏汽车、蔚来等多家车企也开始拥抱“端到端”方案。
传统自动驾驶方案通常将感知、决策和控制分为独立的模块,每个模块各自分工,由此简化系统开发的难度。相比之下,“端到端”是一个整体,它不再试图通过人工编程来处理特定的行车场景,而是使用大量数据进行训练和学习,来覆盖更广泛的行车场景。
不少业内玩家和分析人士认为,“端到端”方案对NOA和高阶自动驾驶有积极意义。
“‘端到端’的目标是拟人化体验,本质在于通过数据驱动,实现精准还原物理世界的感知、并灵活处理各类问题。”自动驾驶公司地平线对时代财经表示:“通过‘端到端’大模型,智能驾驶系统可以更直接、高效地处理传感器数据,并生成准确的车辆控制信号,提供更安全、舒适的城市NOA体验。”
在地平线看来,“端到端”的自动驾驶方案依旧存在三大瓶颈——即算法、算力和数据层面的限制。算法方面需要探索可解释、干预性强的“端到端”自动驾驶系统;同时需要性能更强的算力平台;此外在数据层面,还要有海量、丰富的真实数据。
不过整体来看,“端到端”方案有助于进一步提高自动驾驶技术水平。
“当下车企要在智能驾驶层面实现高效的数据处理,必须借助于‘端到端’的技术。”天津大学中国汽车战略发展研究中心预测研究总监陈丽然对时代财经表示:“‘端到端’大模型技术肯定会取代感知、决策、控制这一传统路线,但是具体方案行业还在探索中。”
声明:本站内容部分源于网络转载,出于传递更多信息之目的,并不意味着赞同其观点或证实其描述。文章内容仅供参考,请咨询相关专业人士。
如果无意之中侵犯了您的版权,或有意见、反馈或投诉等情况, 请联系本站,[qq:]
Copyright ©2025 编程密语 All rights reserved 版权所有 鲁ICP备09004228号-12
 鲁公网安备37020202000738号
鲁公网安备37020202000738号