大家好,我是Maker-T——抖音“MT机械制造所”所长!抖音有很多我的有趣的作品!盼三连!好久没来DF创客社区啦,这次我开源了我设计的一个麦轮战车,先来张照片镇楼!
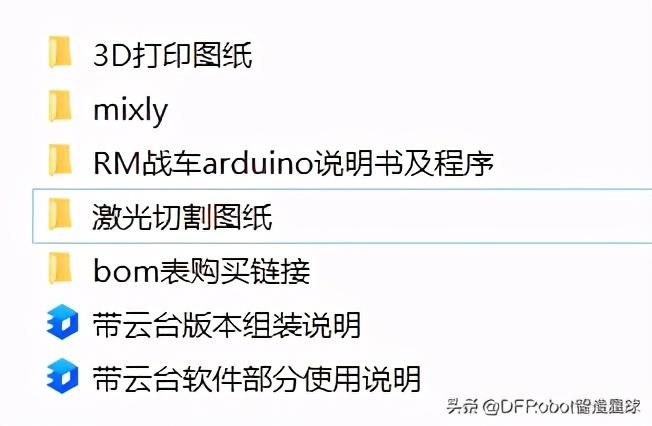
包括它的制作详细步骤,采购BOM表,激光切割图纸,Arduino库及代码和mixly库及代码。
文末可以下载
该教程是针对零基础小白,老司机可以跳着看。
话不多说,开始吧。
需要准备的工具
- 电烙铁和焊锡丝(在家门口的五金店都有的卖)
- 十字起(应该叫十字钟表批,小号起子。五金店也有的卖)
- 热熔胶枪及热熔胶棒(五金店也有卖)
- 剪刀或者剥线钳(用于拨开电线的绝缘皮)
- 一台windows系统电脑。
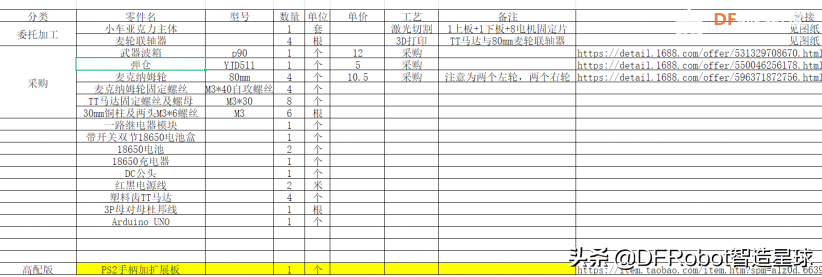
需要准备的材料
下载附件文件夹,里面有所有零件的bom表,按照链接购买。
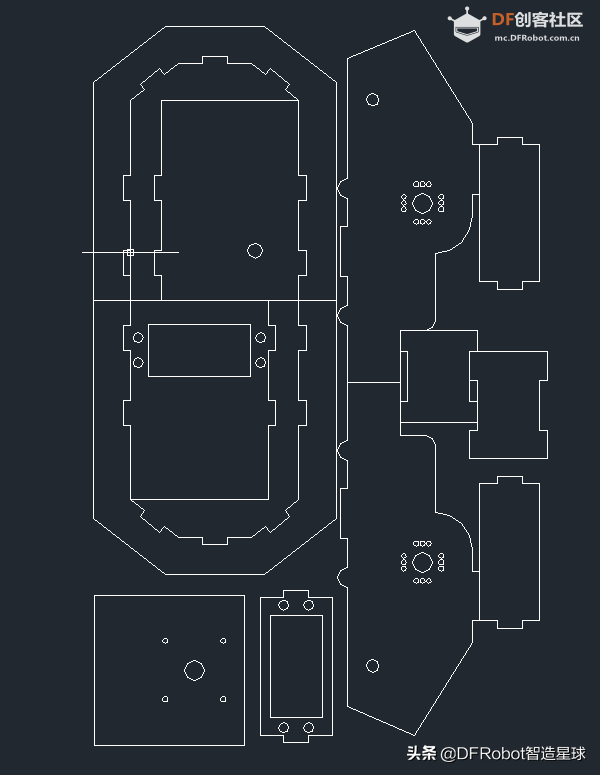
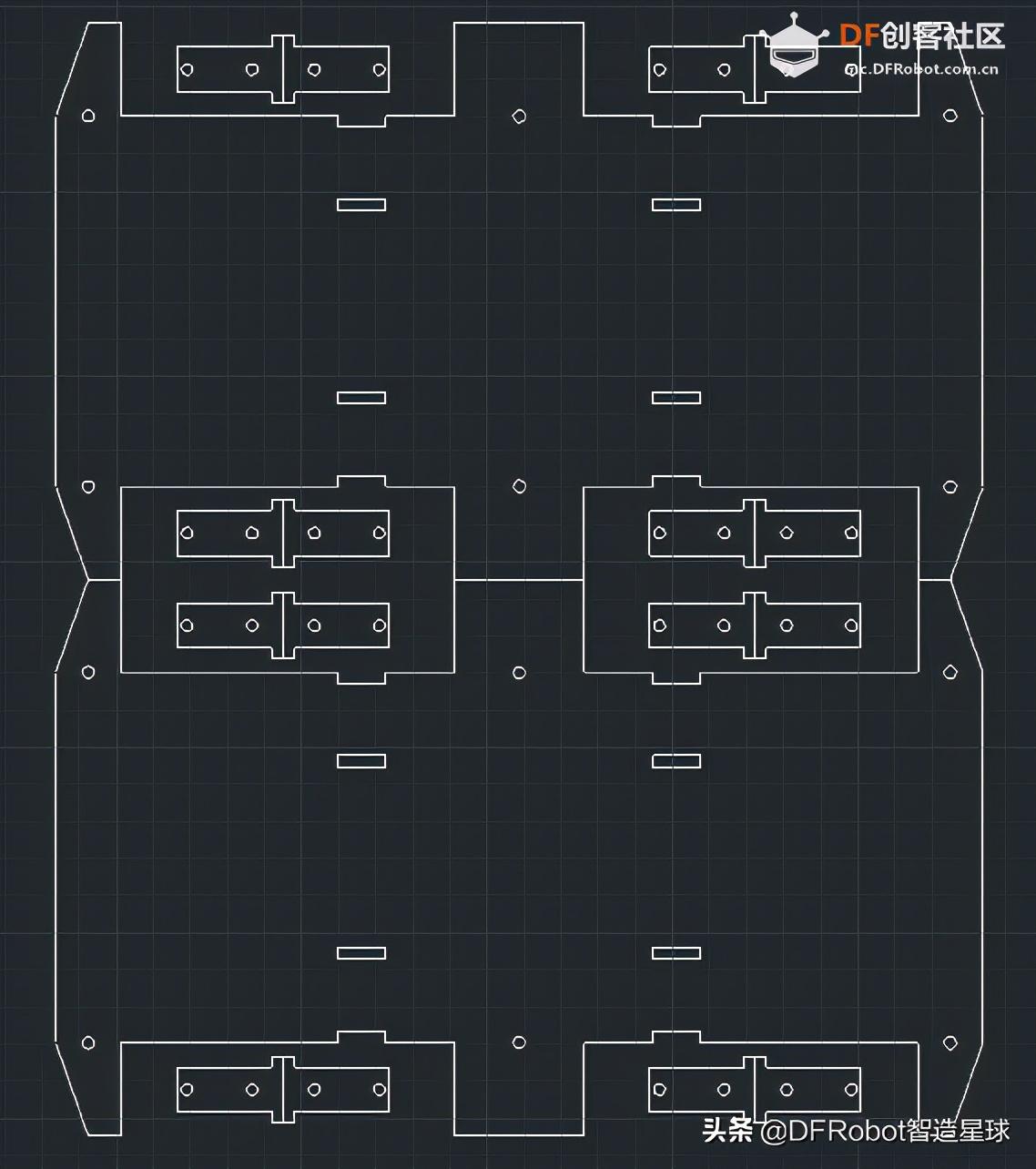
打开激光切割图纸,3mm亚克力及椴木板激光切割都可以。建议使用椴木板。
打开车轴stl,使用FDM 3D打印机打印4根车轴。
硬件组装
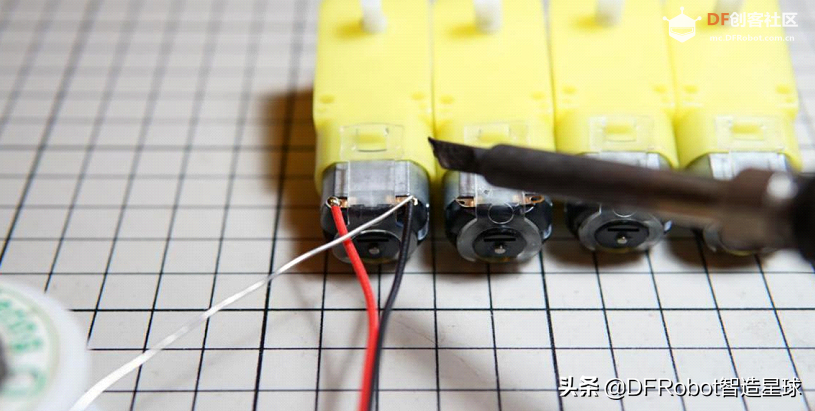
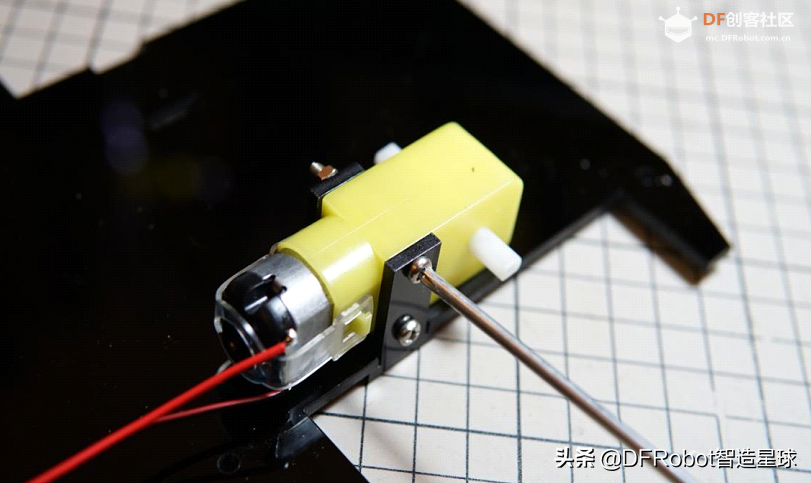
- 取出四个TT马达及四根红黑电源线。
- 将红黑电源线穿过电机金属触点,红色焊接左边,黑色焊接右边。
- 其他三个电机同理。
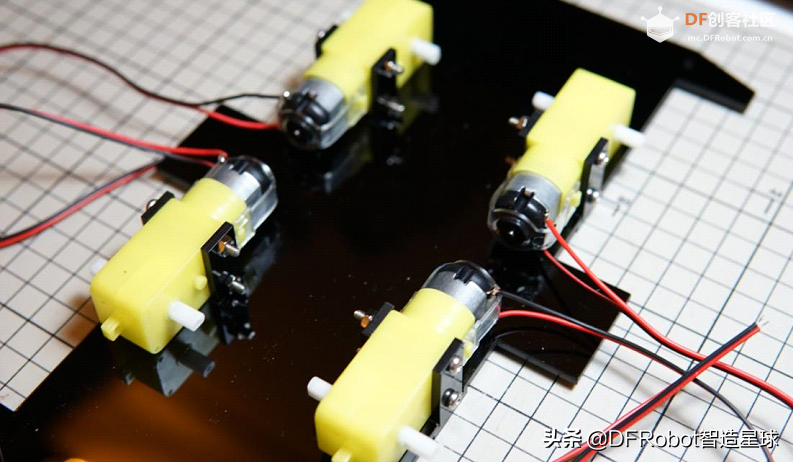
- 如图所示安装电机固定片和电机,用长螺栓及螺母固定紧电机。
- 其他三个电机同理。注意电机的方向,白色出轴在轮子槽的中心。此时我会建议在电机和底板处打上热熔胶,这样会更加牢固。
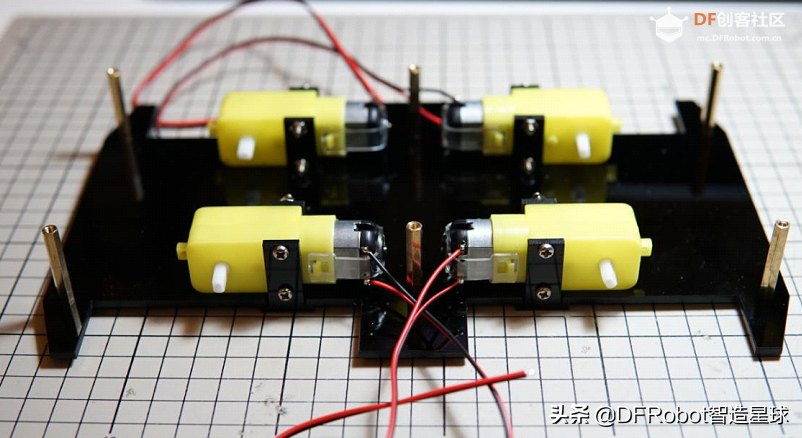
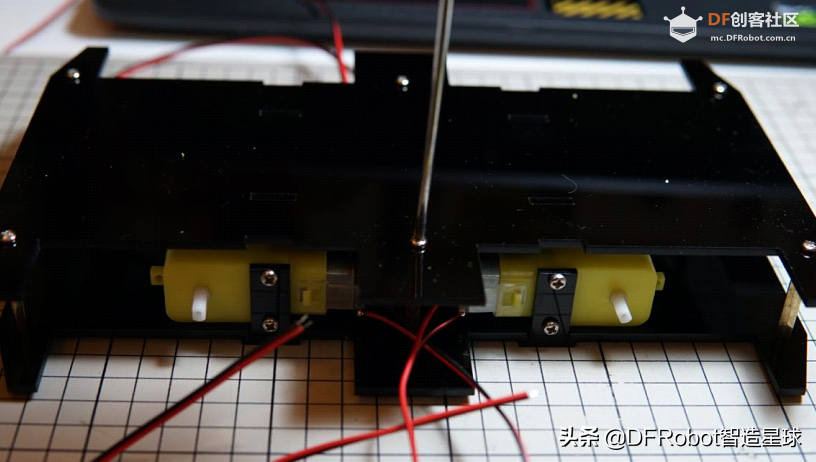
- 如图用短螺丝固定铜柱
- 再将上盖板盖上,拧上短螺丝固定到铜柱上
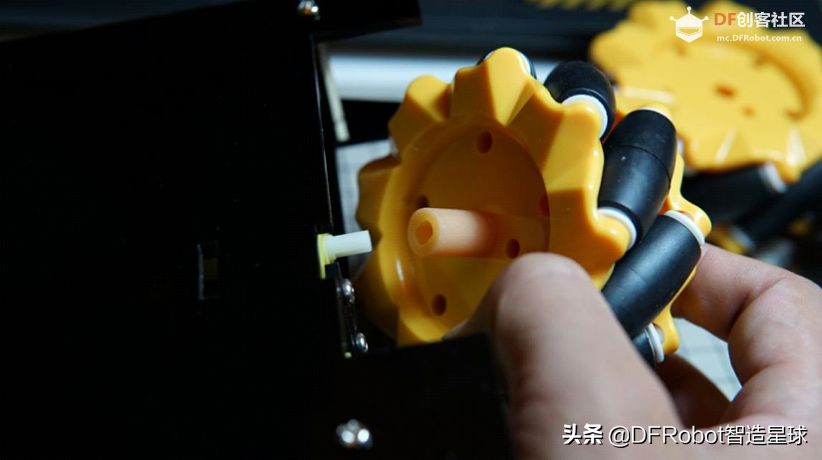
- 注意麦克纳姆轮是有方向的。在背面有写L和R字样。左前轮与右后轮是L,右前轮与左后轮是R。(请确保方向与下图一致)蓝色金属轴电机用内六角40mm长内六角螺丝固定轮子和白色联轴器。黄色塑料轴电机用尖头自攻螺丝固定轮子和橙色联轴器。
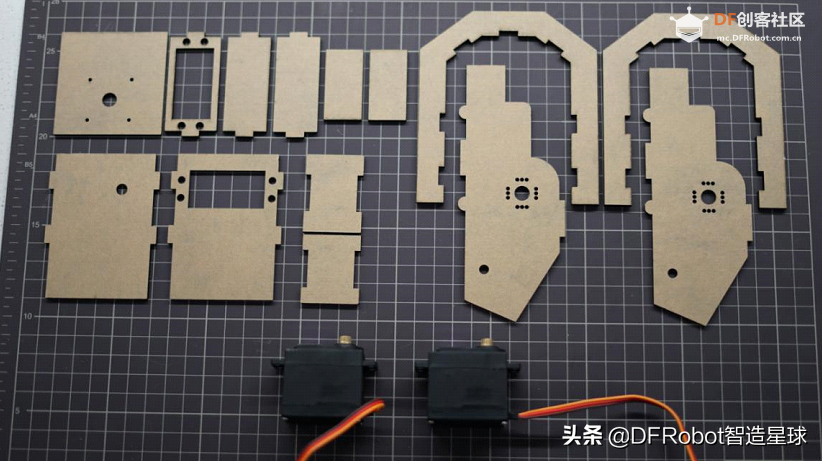
云台安装
准备以下材料:
开始组装:
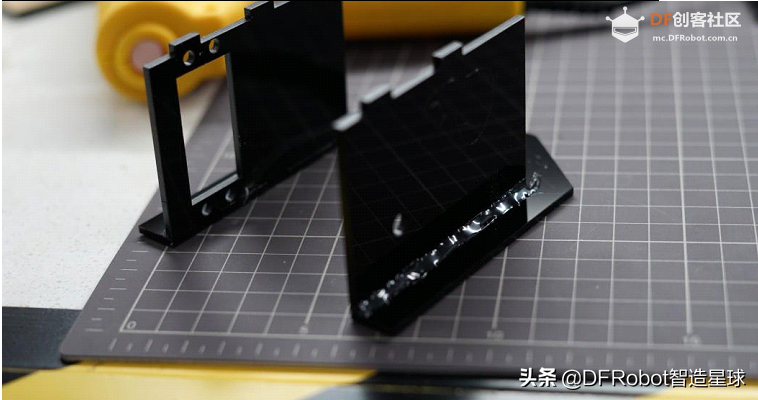
- 左右挡板和前后挡板互相卡在一起,用热熔胶固定。注意左右板是不同的。
- 再将侧下板安装好,安装好之后是这样的。
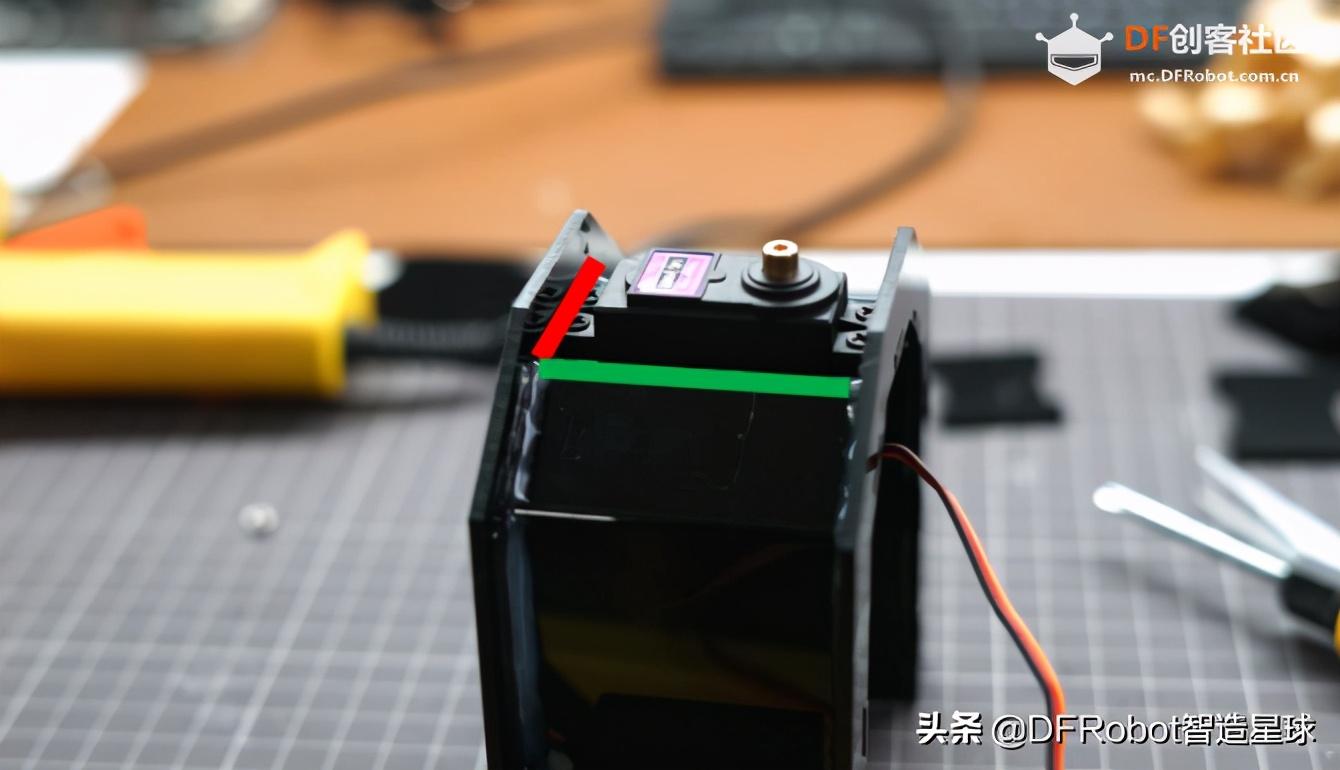
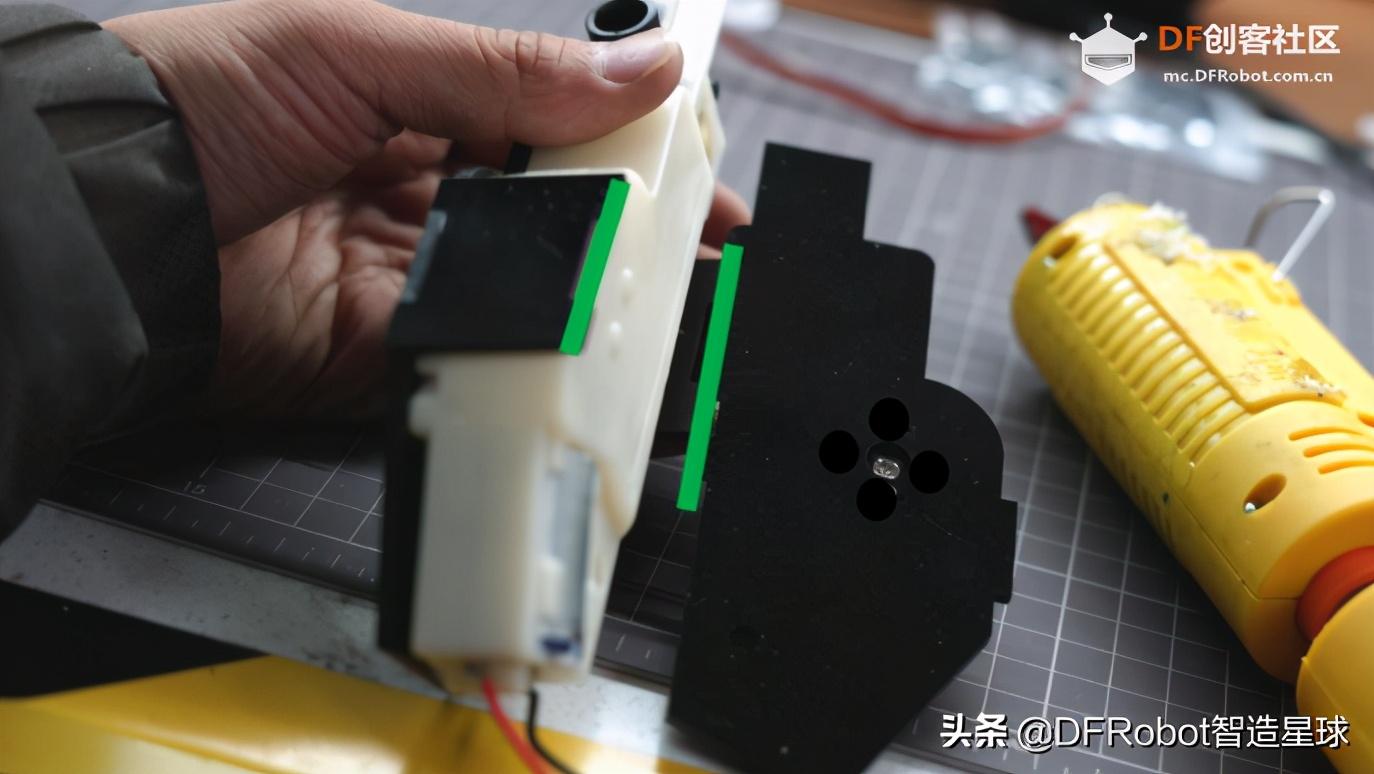
- 安装下舵机固定板。注意下舵机固定板的热熔胶不要打在两侧红色区域,否则会干涉舵机的安装。应打在两侧绿色区域。
- 将侧面舵机安装好。
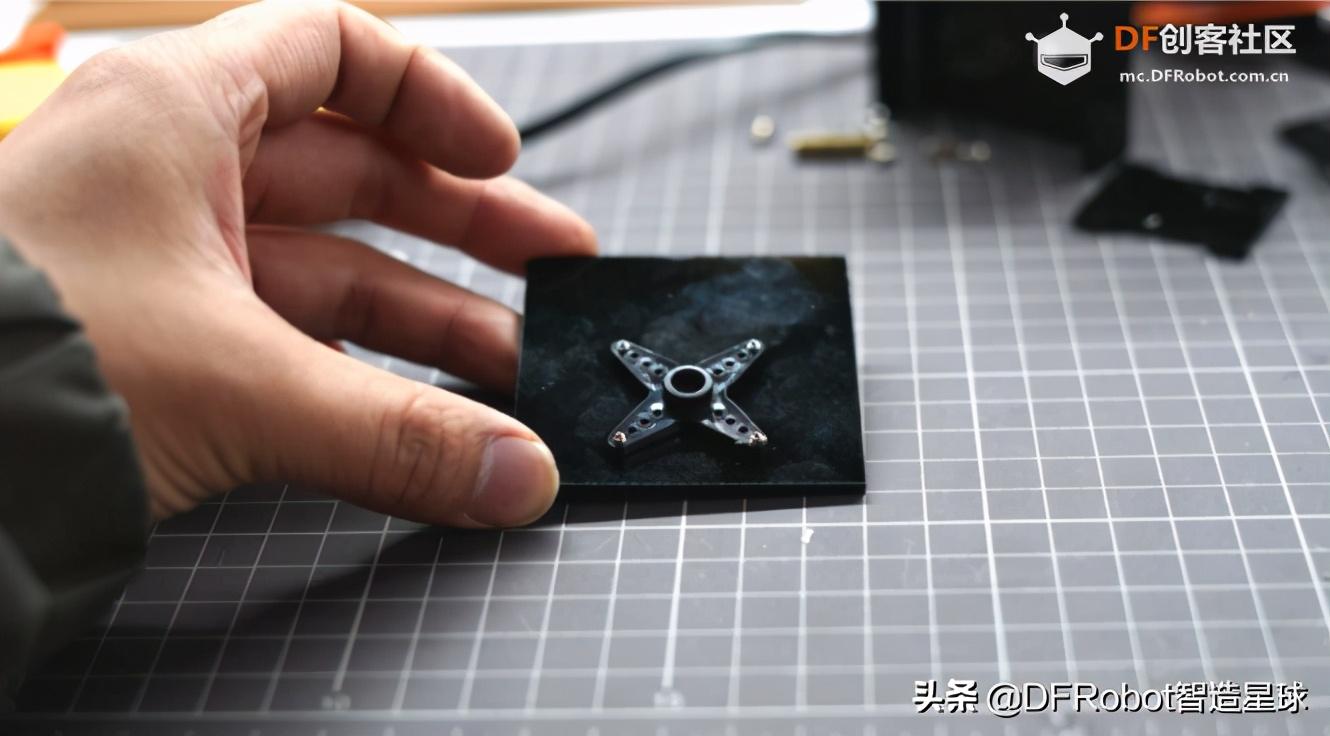
- 把十字舵盘安装在底板上。自攻螺丝收紧。
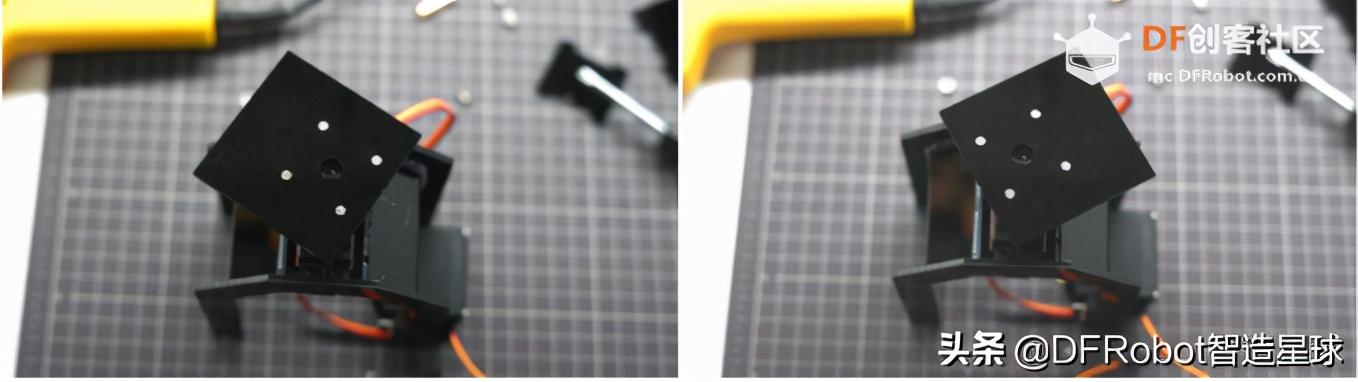
- 将底板安装上舵机,注意安装的方向,顺时针旋转到底,逆时针旋转到底,底板刚好对称。这样就能满足开机后90度是在中间位置。如图所示。
- 20mm长铜柱用螺丝拧进舵盘,注意这颗螺丝必须拧紧。
- 用美工刀切掉凸起
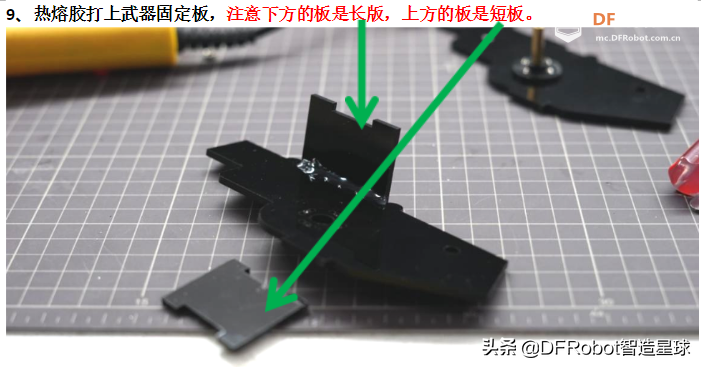
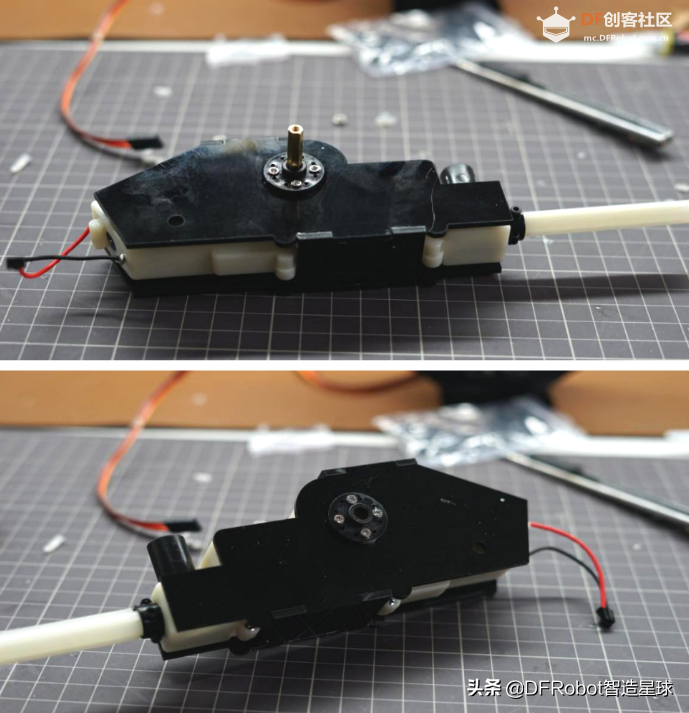
- 热熔胶打上武器固定板,注意下方的板是长版,上方的板是短板。
- 将武器波箱放进武器固定板。
- 在两处绿色区域打上热熔胶迅速将侧板盖好。
- 从外向里拧进自攻螺丝固定两侧舵盘,注意舵盘左右不一样,按照图上所示操作。
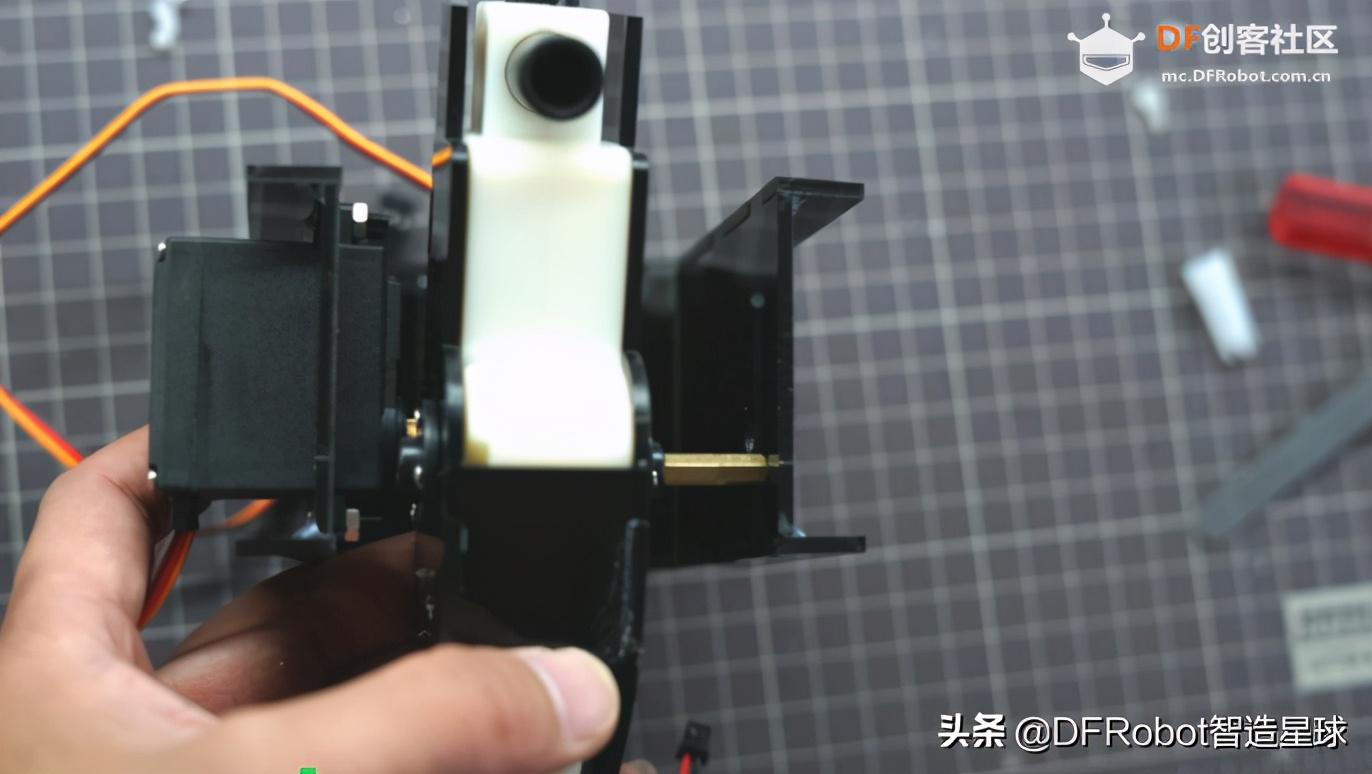
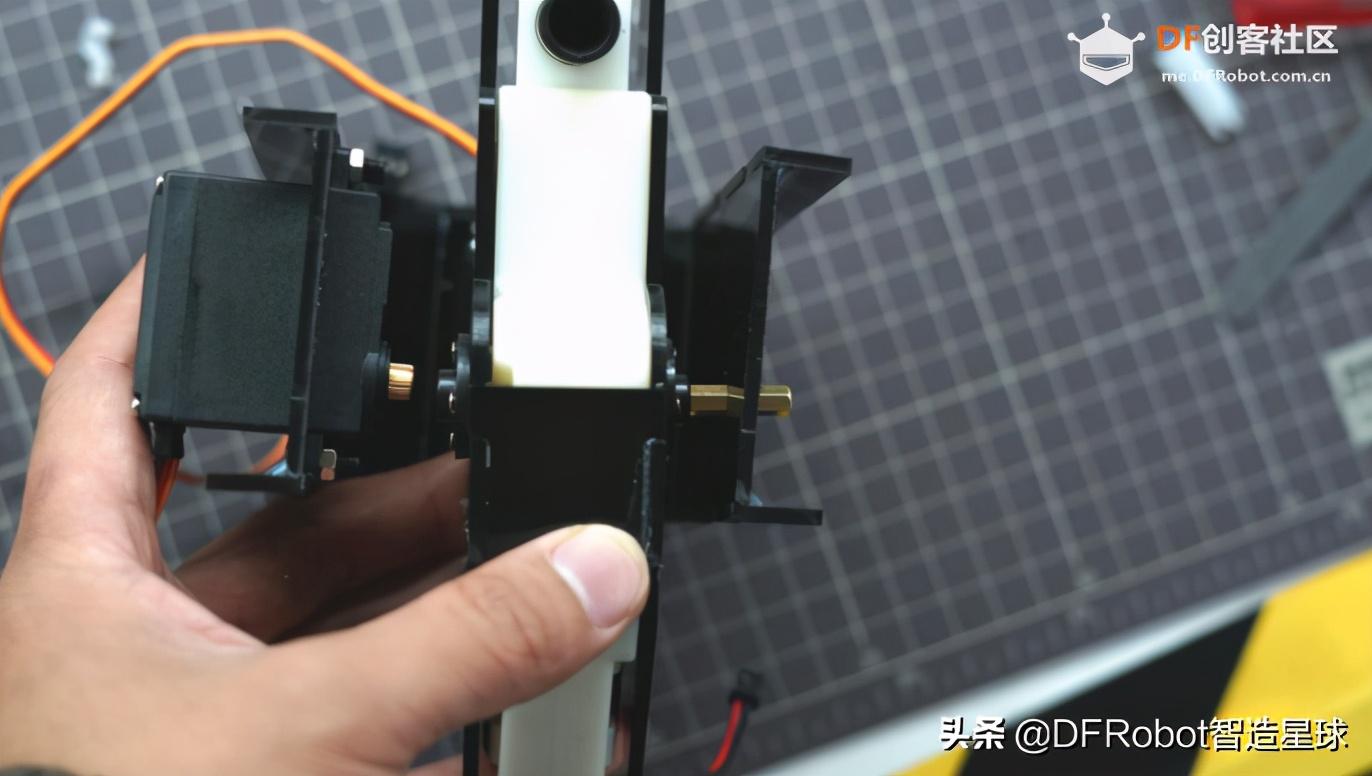
- 这一步非常重要。请认真理解再操作,将武器总成放进云台,舵机和舵盘先靠近在一起,不要安装进去。你会发现右侧铜柱距离侧板上的小洞只有大约5mm距离,稍微用力就能将铜柱挤进小孔中。(切记不可大力出奇迹)
- 然后再安装舵机和舵盘,这里需要用力按紧舵机舵盘。也要注意受力点放在舵机和武器总成上,不要硬掰亚克力板。最后右侧铜柱上拧上螺丝
电路的连接
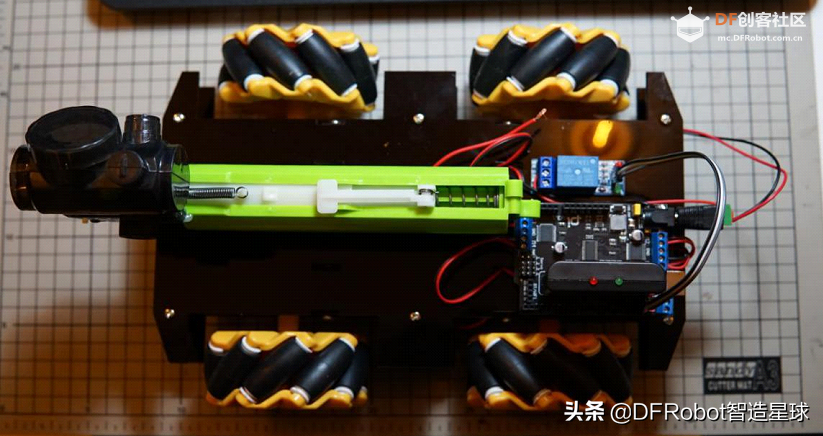
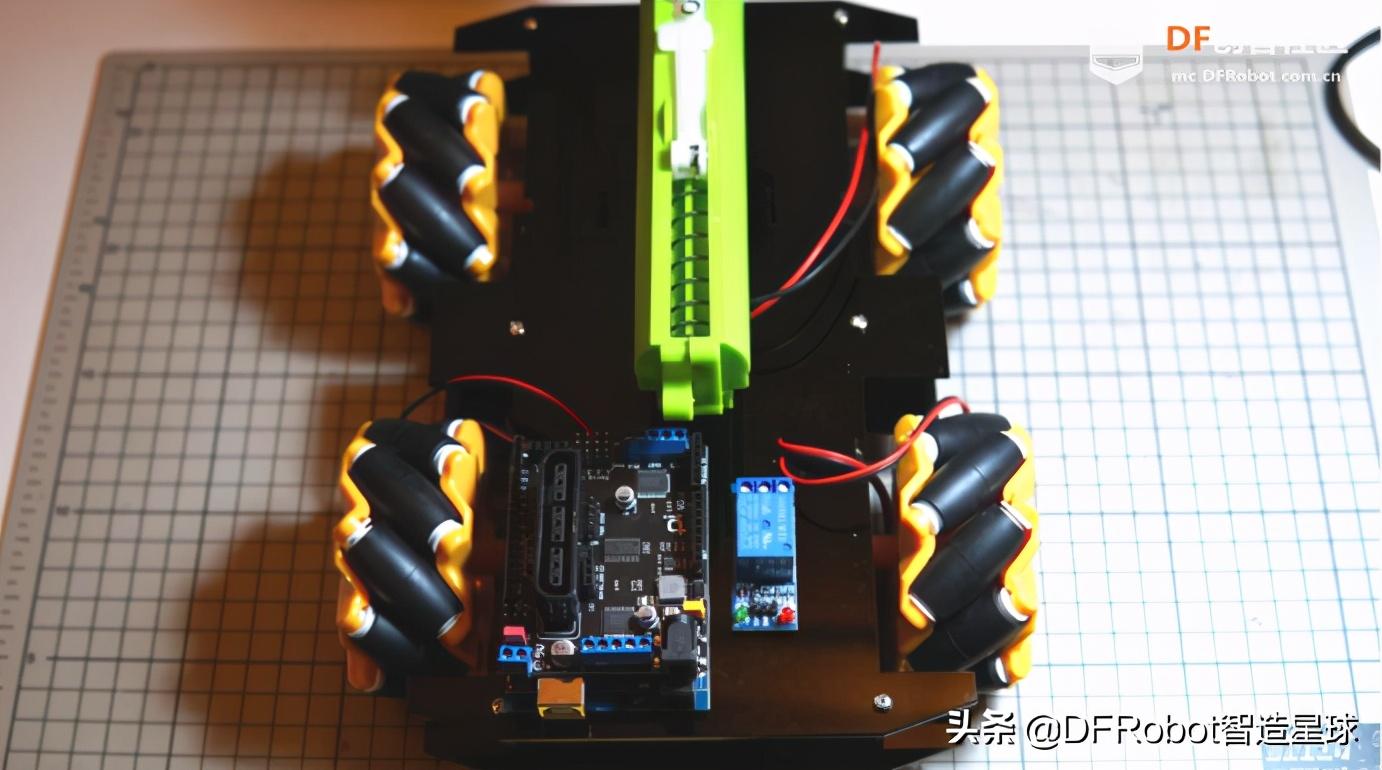
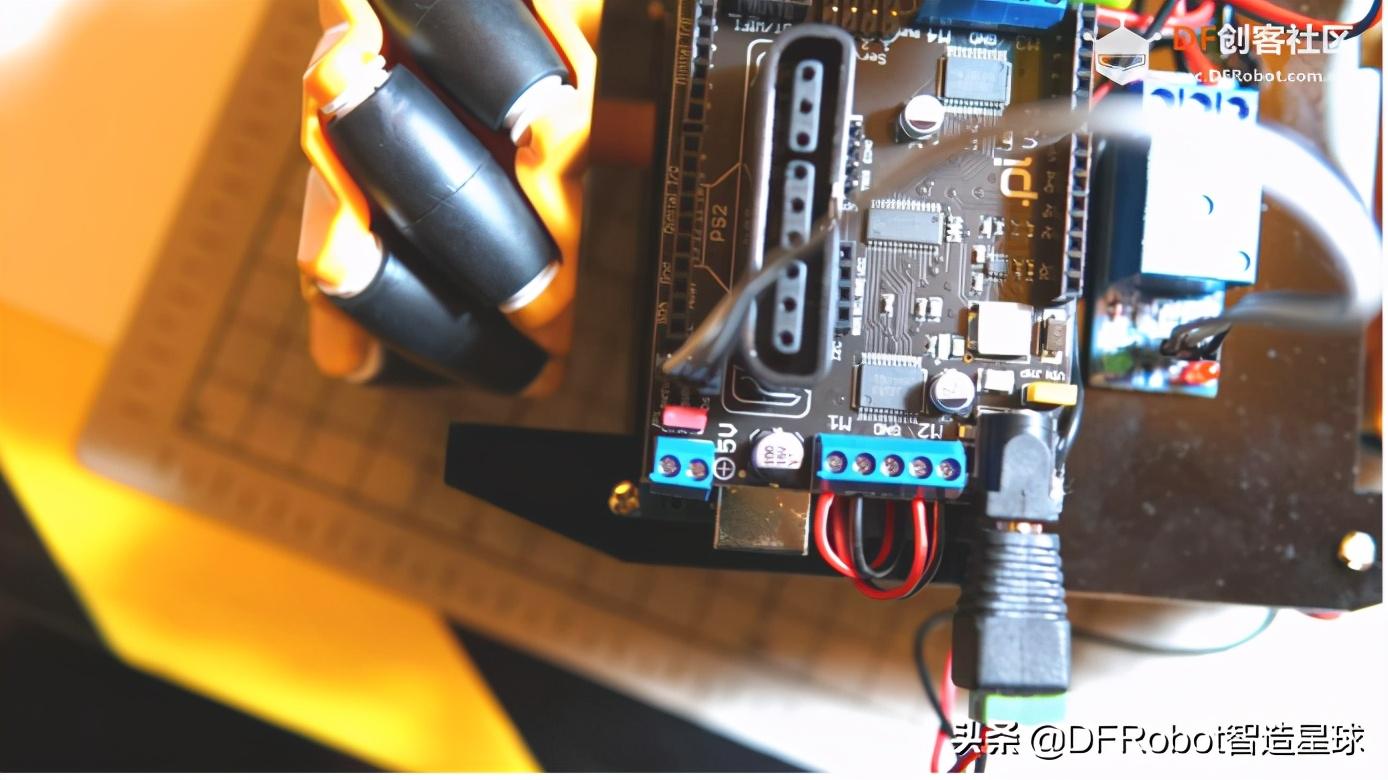
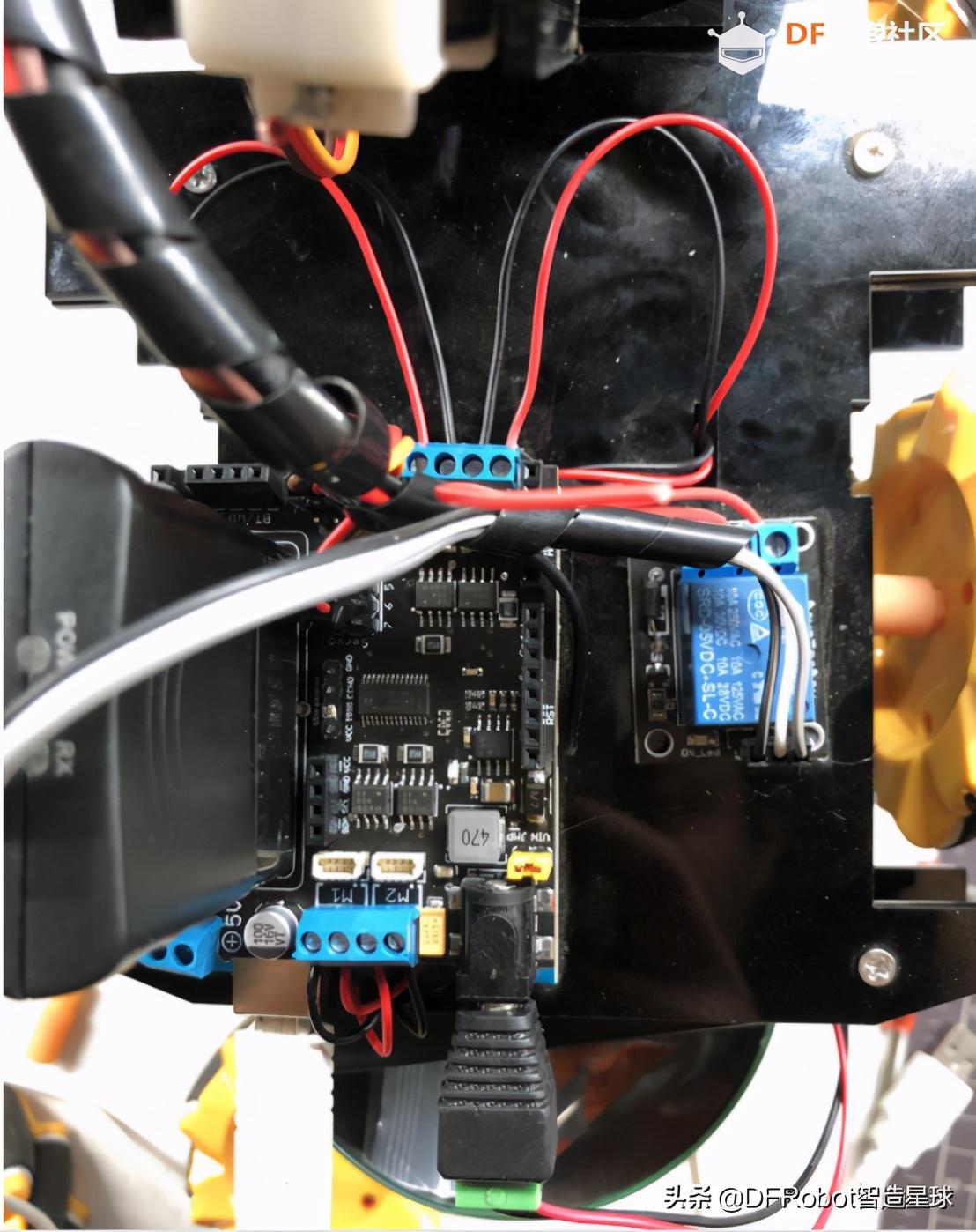
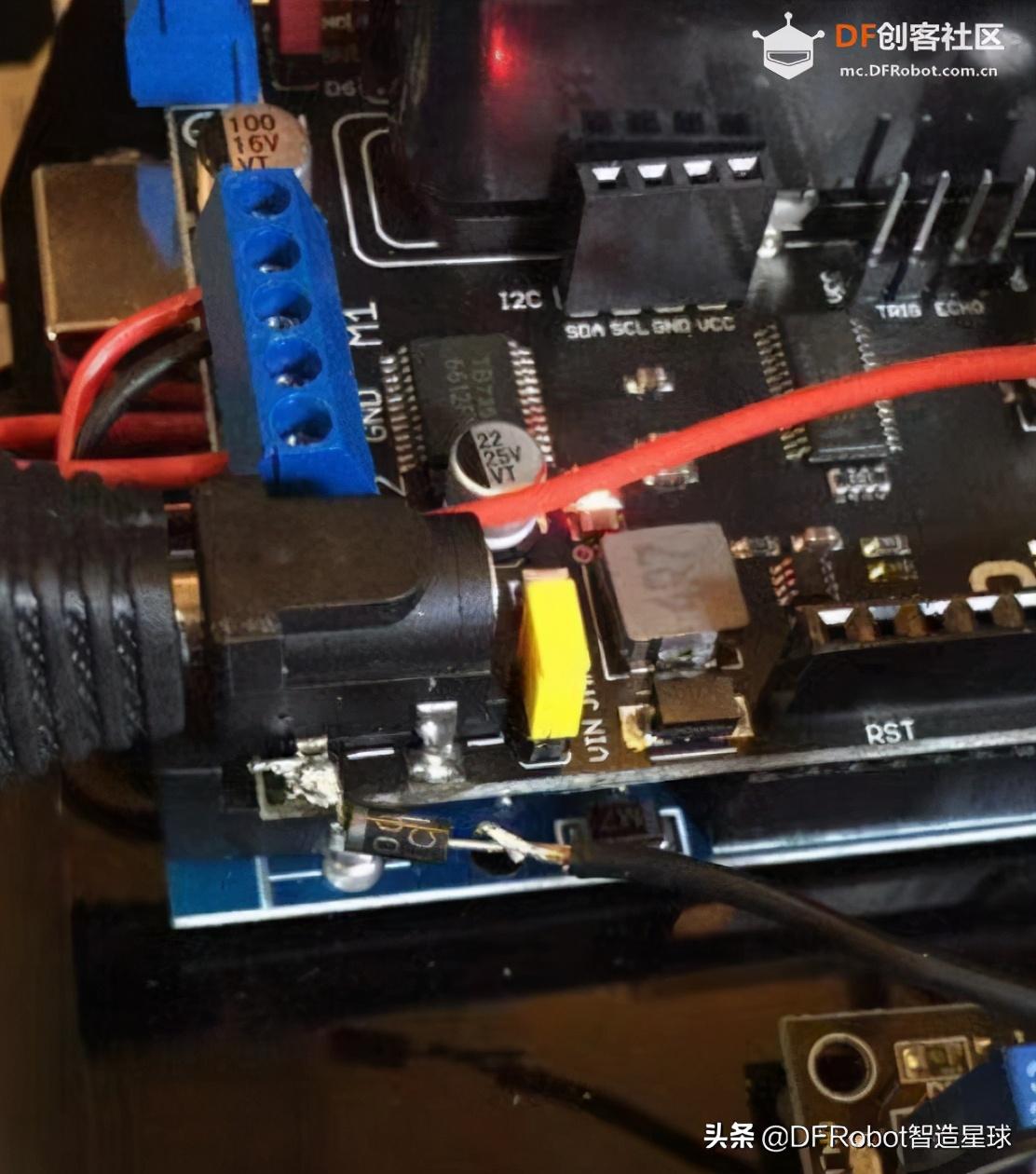
- 将扩展板和arduino控制器安装在一起,在背面打上热熔胶,粘在小车后部左侧。将继电器模块打上热熔胶,粘在后部右侧。
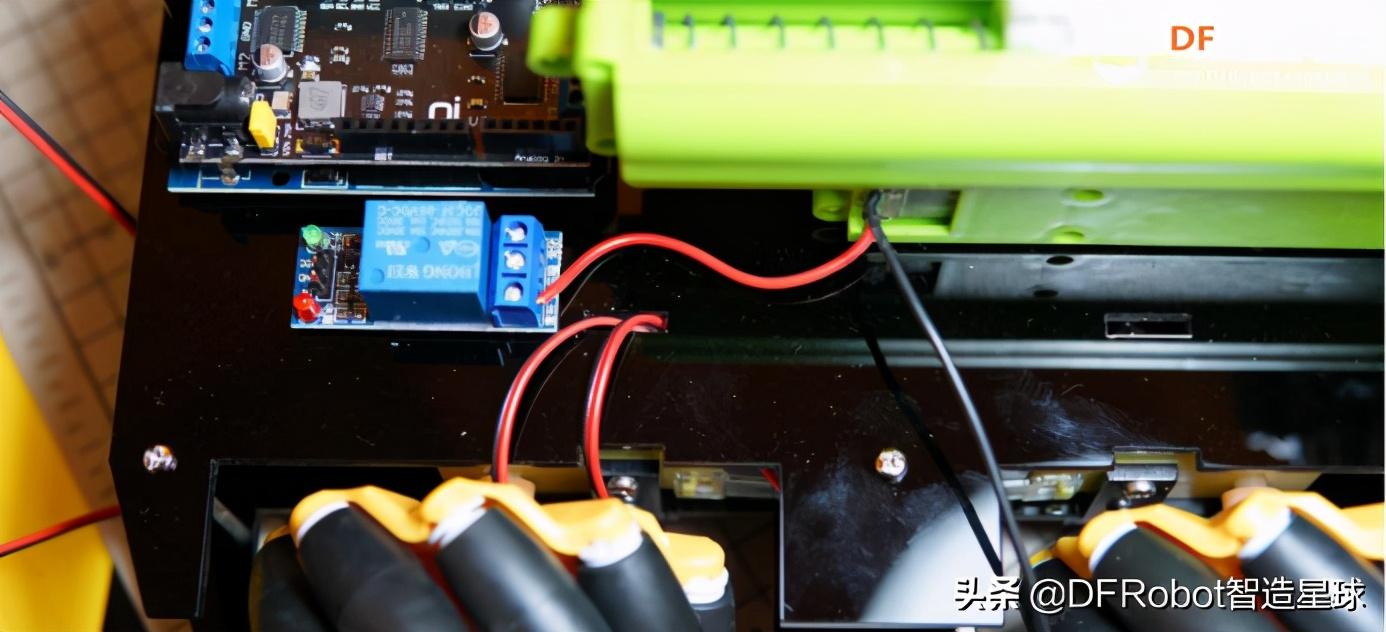
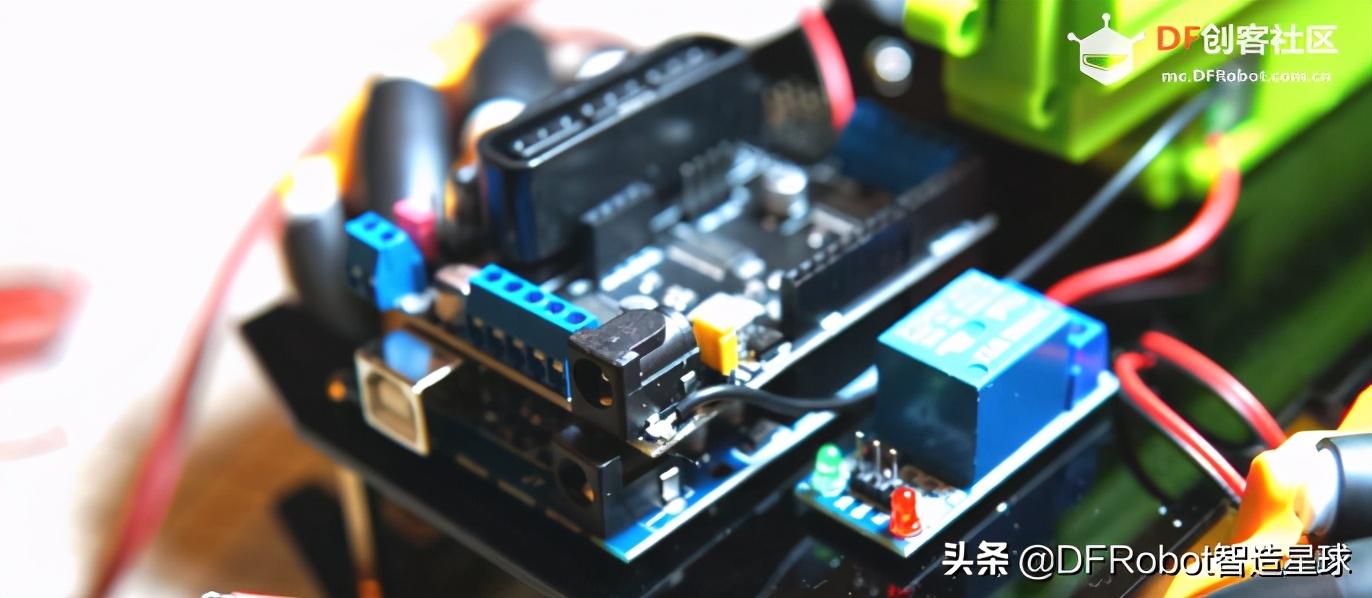
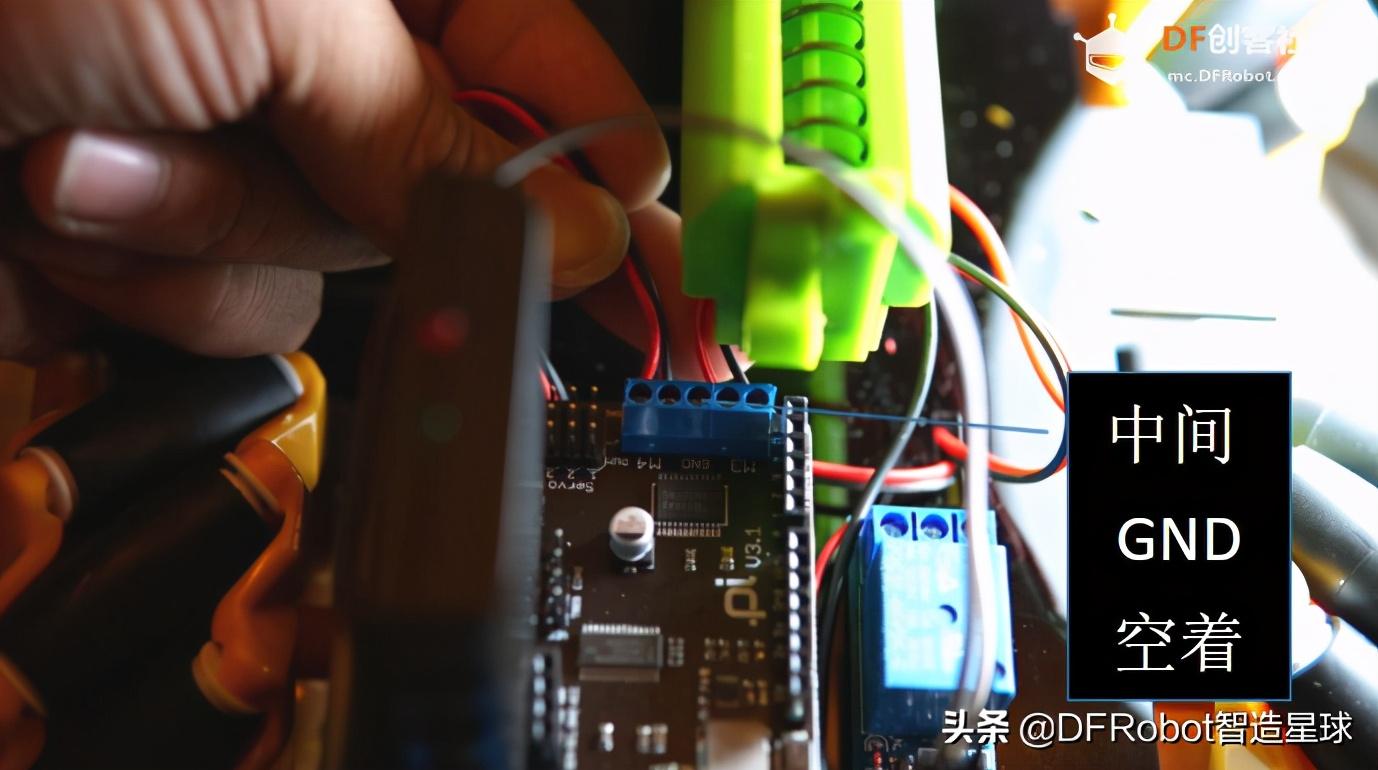
- 武器部分,正极红色电线连接至继电器常开端,负极黑色电线焊接至扩展板电源DC座负极。如图所示。
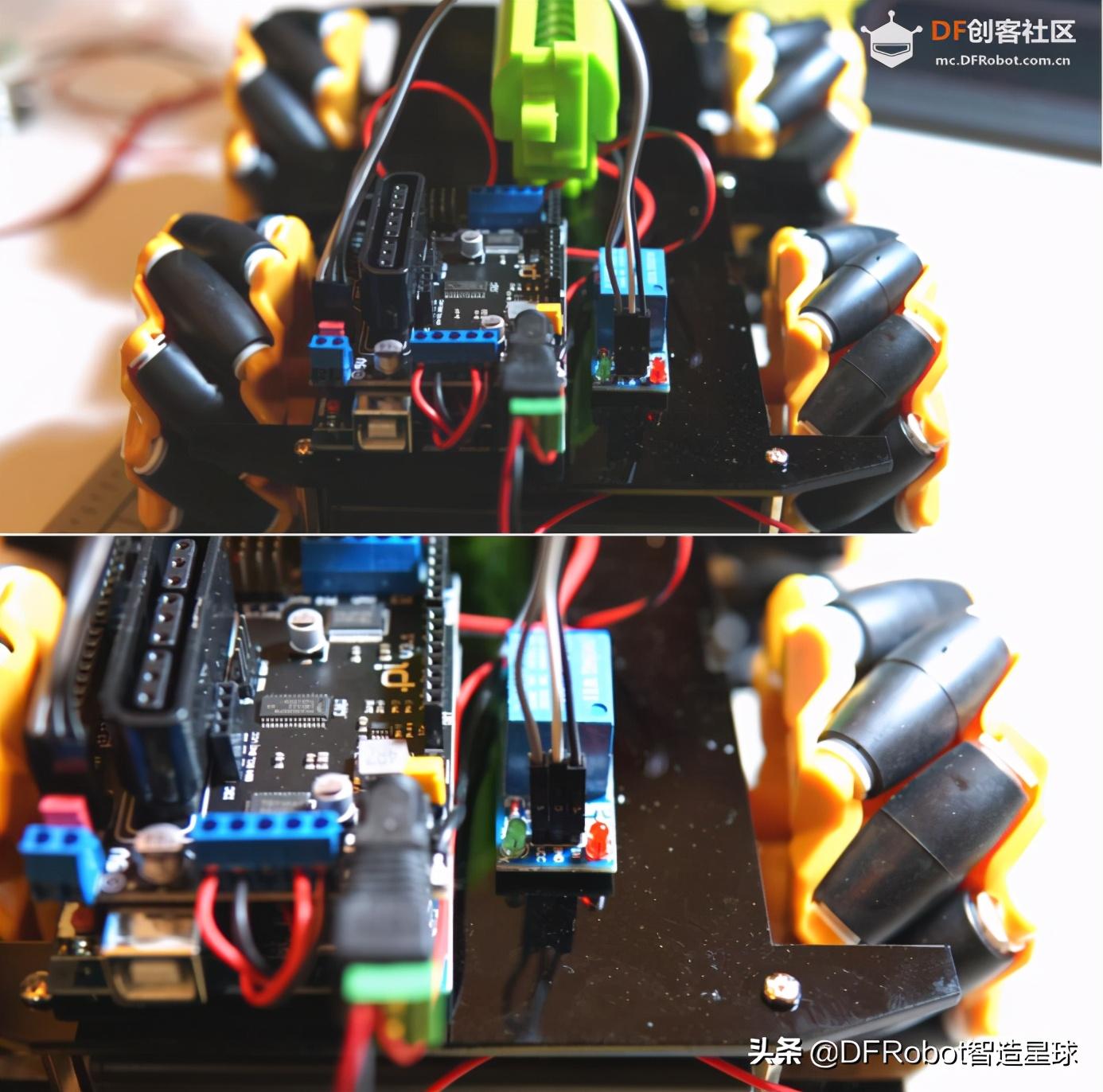
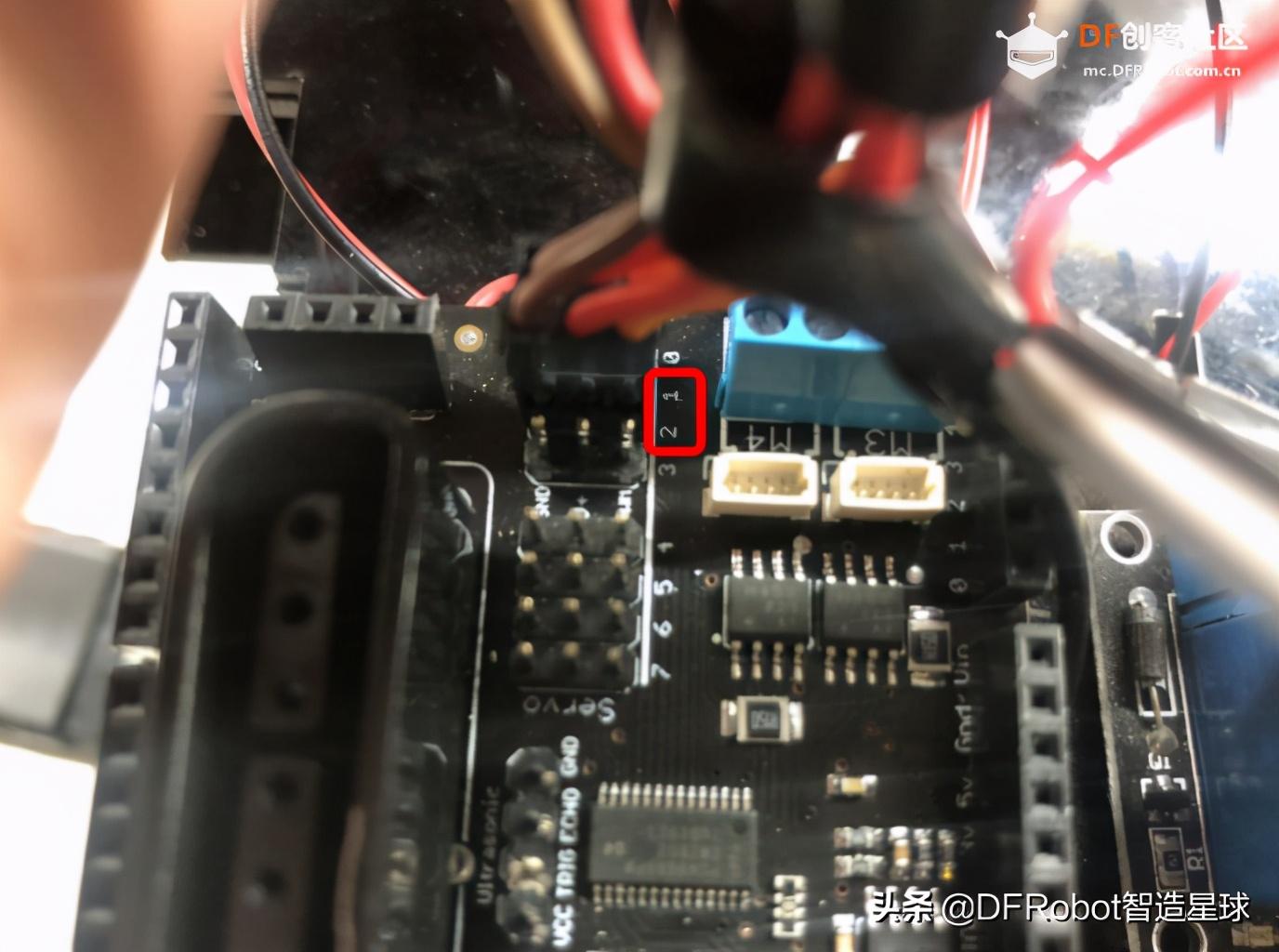
- 用3p杜邦线一头连接在电路板D6排口,一头连接至继电器模块信号口,注意:两边插口不是对等的,D6排口有三个插针,分别是GND,5V,D6,继电器模块有三个插针,分别是VCC,GND,IN。他们之间的连接,需要对号插:5V--VCC,GND--GND,D6--IN。如图:
- 用3p杜邦线一头连接在电路板D6排口,一头连接至继电器模块信号口,注意:两边插口不是对等的,D6排口有三个插针,分别是GND,5V,D6,继电器模块有三个插针,分别是VCC,GND,IN。他们之间的连接,需要对号插:5V--VCC,GND--GND,D6--IN。如图:
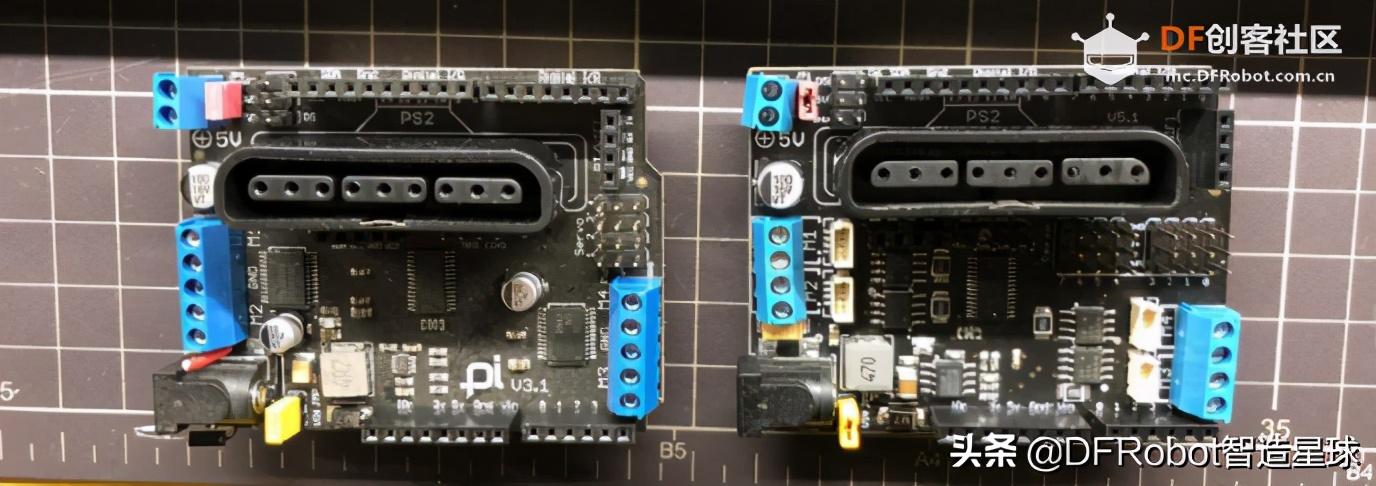
- 四个电机电线接入电路板,注意:电路板有两个版本,老版本左V3.1和新版本右V5.1。请看下图。
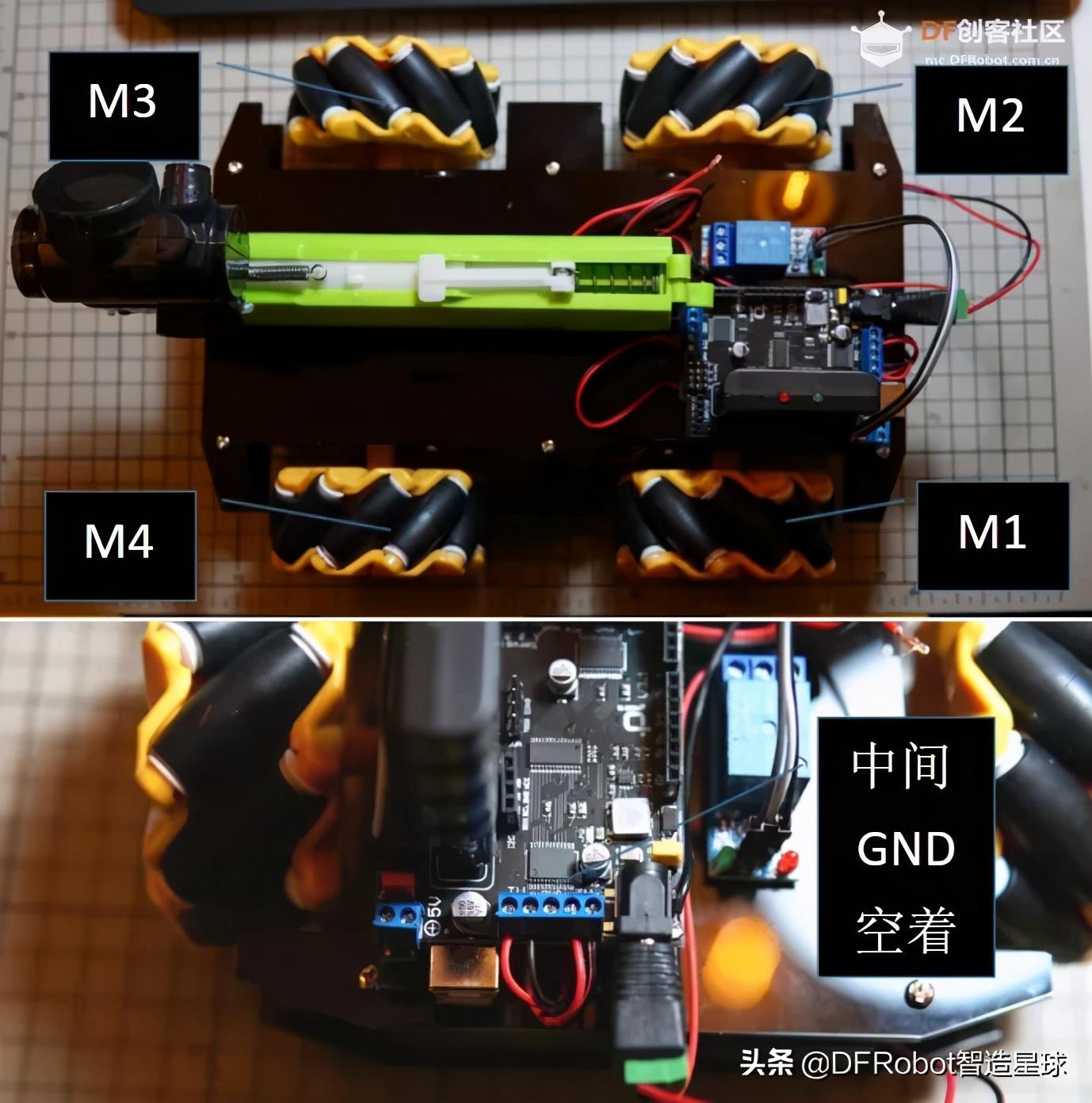
- V3.1接线方式:左后轮电机接入M1,左红右黑。右后轮电机接入M2,左红右黑。右前轮电机接入M3,左红右黑。左前轮电机接入M4,左红右黑。
- V5.1接线方式:电机位置与V3.1一致,但红黑线的线序不同。左后轮电机接入M1,左黑右红。右后轮电机接入M2,左红右黑。右前轮电机接入M3,左黑右红。左前轮电机接入M4,左红右黑。
- 用热熔胶将整个云台固定在小车上。底部舵机插在servo1,侧面舵机插在servo2上,注意插头正反,黄线是pwm,棕线是gnd。
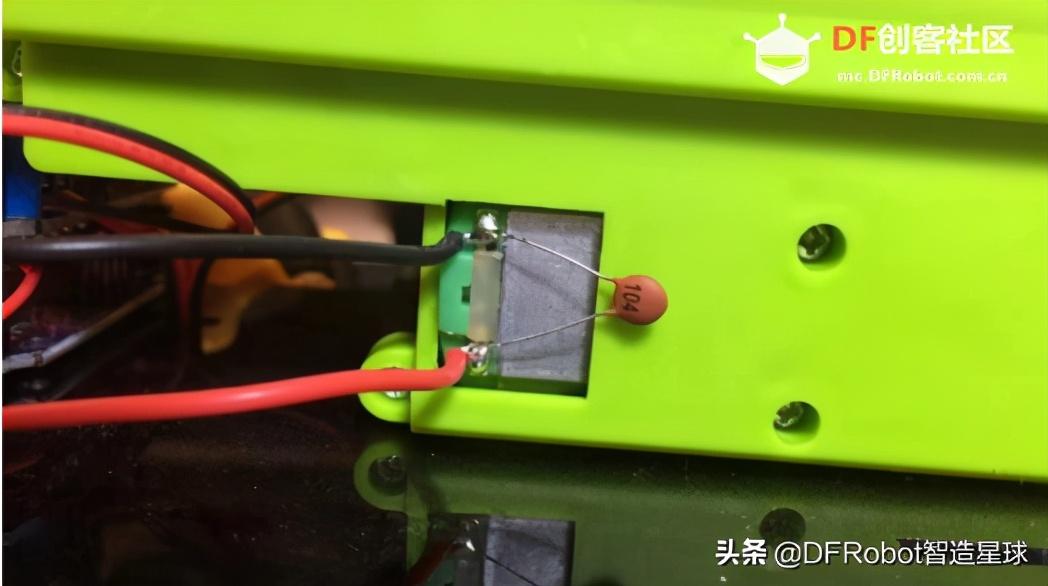
- 武器部分同不带云台版本武器一样安装接线。注意:瓷片电容和二极管同样需要焊接的。焊接方式查看文末BUG修复。武器电机也是有正负极之分的,大家拆线注意上面的触点是正极接红线。弹仓的安装也与不带云台版本一致,同样注意弹仓的出单口要对准波箱的进弹口。
- 刷入新的带云台版本的固件。操作方式同不带云台版本一致。参考软件说明。
- 装上18650电池及遥控器七号电池。
- 硬件部分全部安装结束。下面进行程序下载及调试。
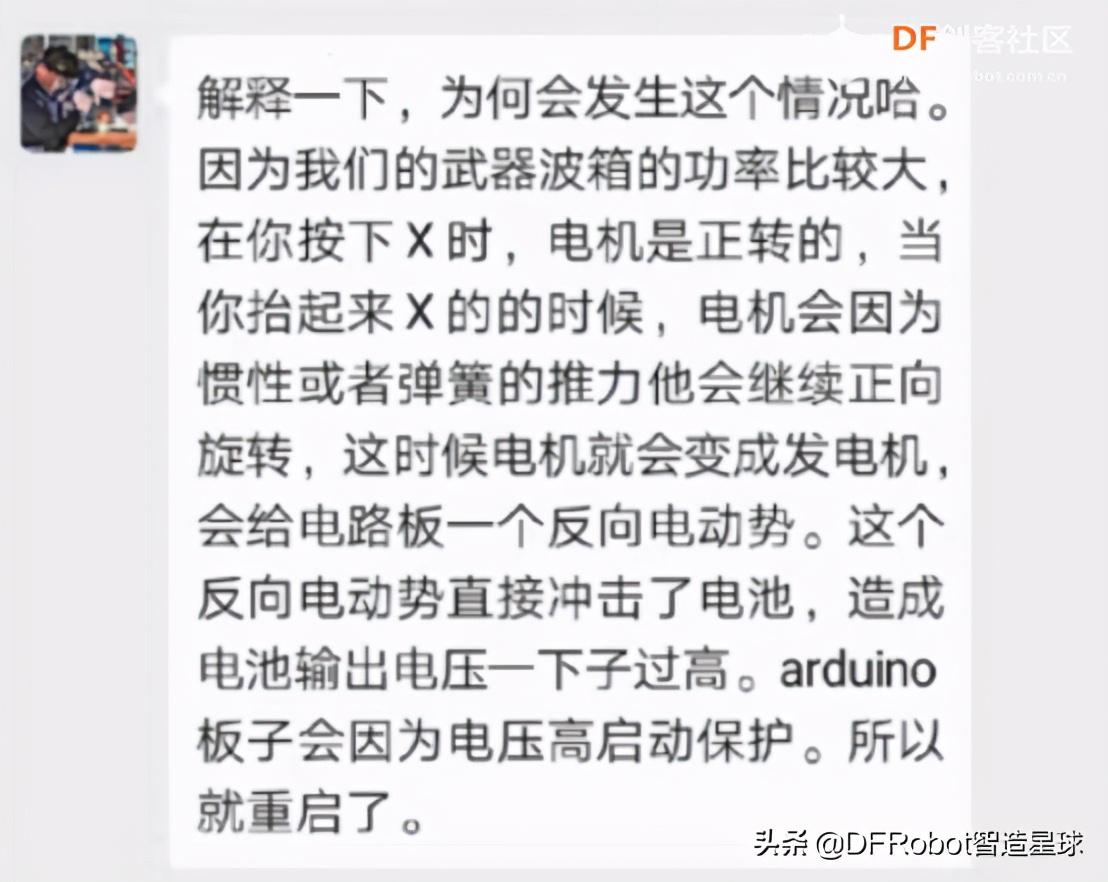
- bug修复更新:有小伙伴反馈开火后会遥控会断开连接重启。
解答:
原因:
解决方法:
程序安装调试
硬件部分全部安装结束。下面进行程序下载及调试。
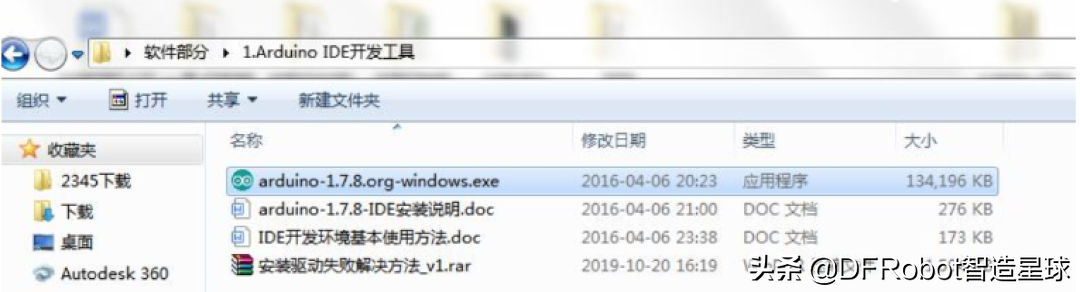
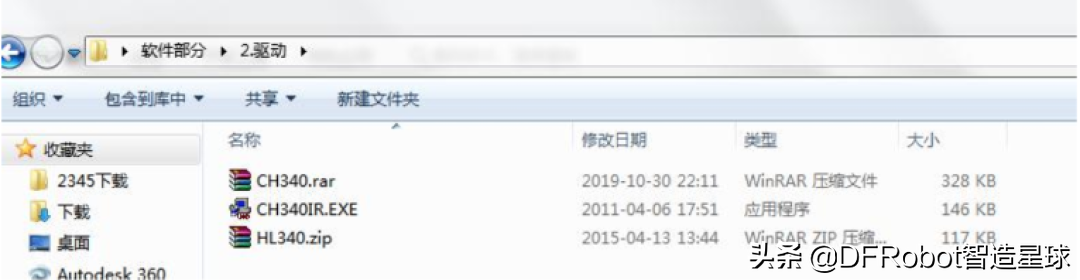
- 安装IDE程序开发软件,根据安装说明一步一步安装。
- 安装arduino开发板驱动程序。提供了三个版本的驱动,都可以使用。安装一个即可。如果驱动安装不成功,请参考安装驱动失败解决方法。
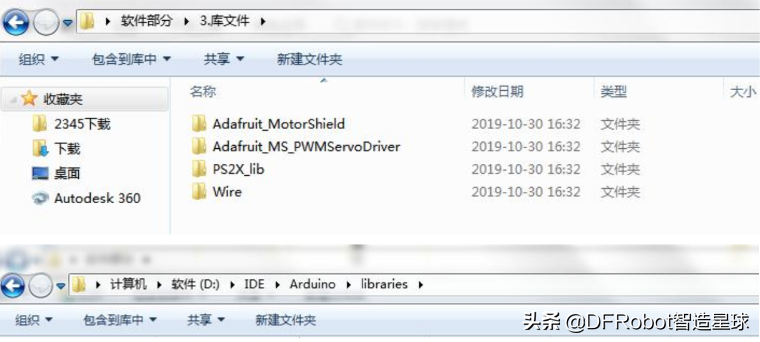
- 将库文件中的四个文件夹,移动到第一步中的IDE安装位置中的libraries文件夹中。
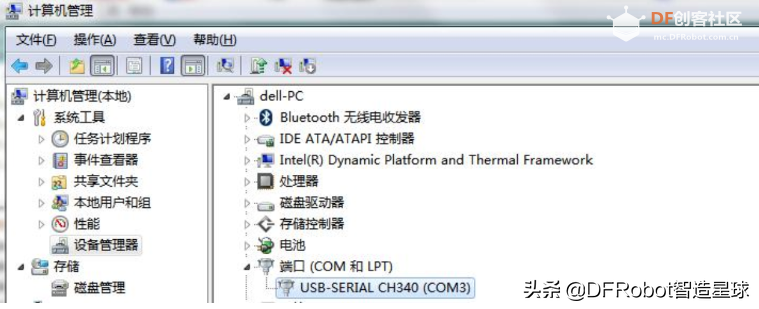
- 用串口数据线将电脑USB与arduino板连接。如果第二步中的驱动安装正确,就可以在“我的电脑”——“右击管理”——“左击设备管理器”——“左击端口”—中看到arduino板已经连接至电脑的COM3串口,记住这一串口号。
- 打开RM程序,有三个版本的程序:
- RM(不带云台的版本)
- yuntaiRM(V3.1的电路板版本)
- yuntaiRM V5.1(V5.1的电路板版本) 请写符合自己的版本程序。
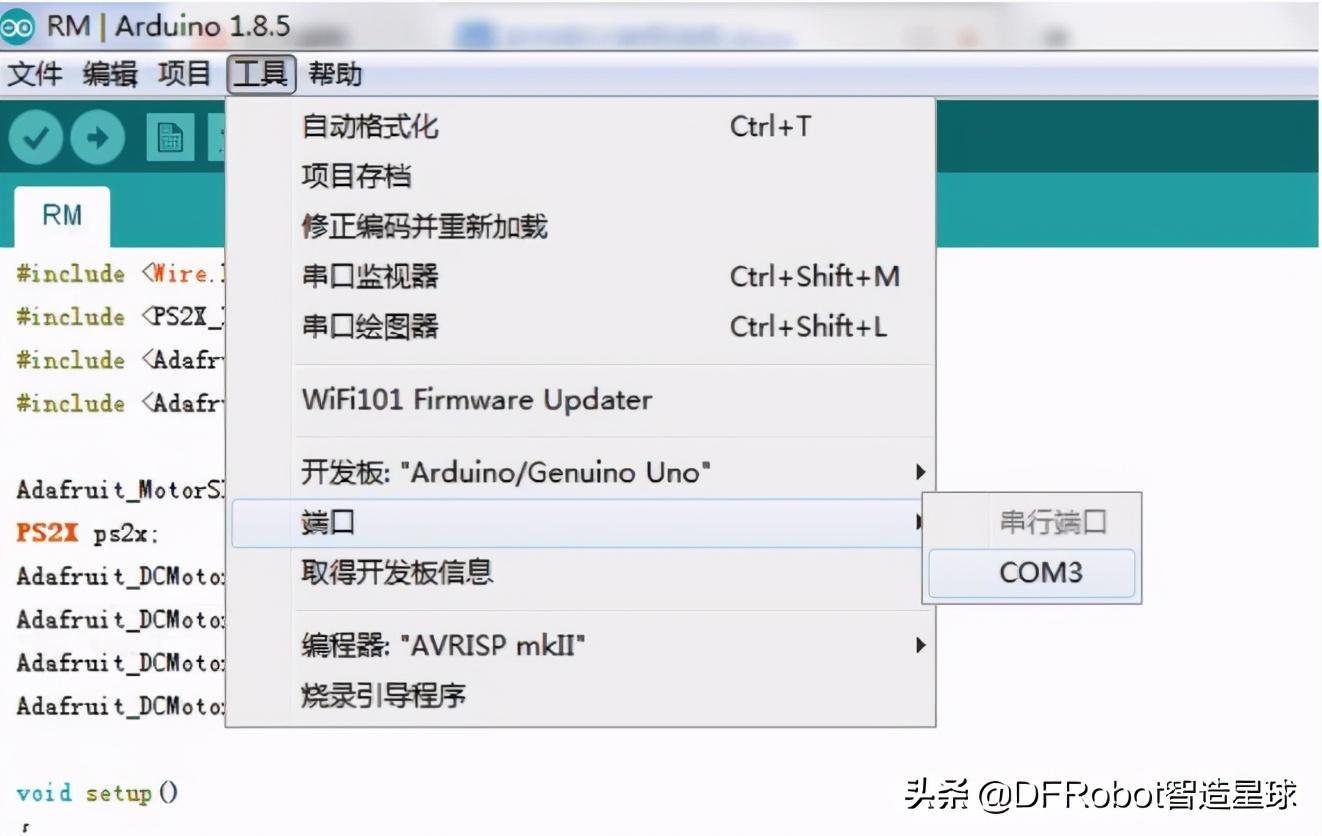
- 左击工具——开发板——Arduino UNO
- 左击工具——端口——COM3(你电脑上第四步看到是几号就选几号)
- 左击验证,会显示编译完成。说明程序没有问题,可以进行上传。
- 左击上传,会显示上传成功,那么程序已经上传到arduino板里面去了。
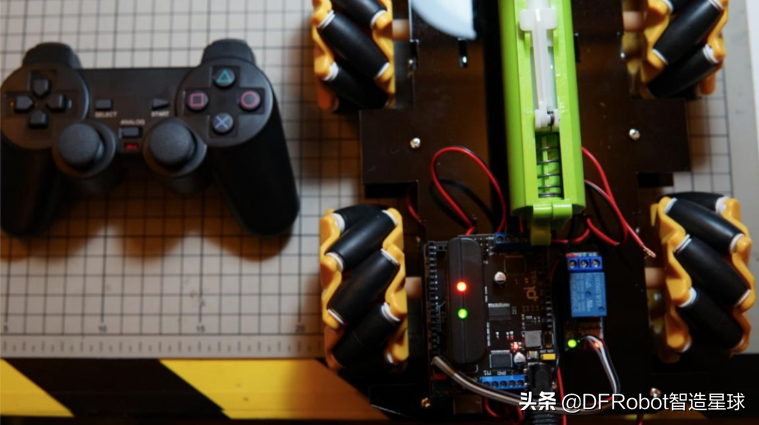
- 打开小车电池盒上的开关。打开遥控器开关,遥控器会自动配对,当小车上的接收器不闪灯,遥控器上不闪灯,表示配对成功,可以进行操控了。
- 操控说明:
左摇杆分别控制小车前后左右平移。L2控制左转弯,R2控制右转弯。X控制开火(开火键请用点动的方式按压)
- 武器云台升级包。用同样的方式更新程序,右摇杆控制武器云台的瞄准。
更新:
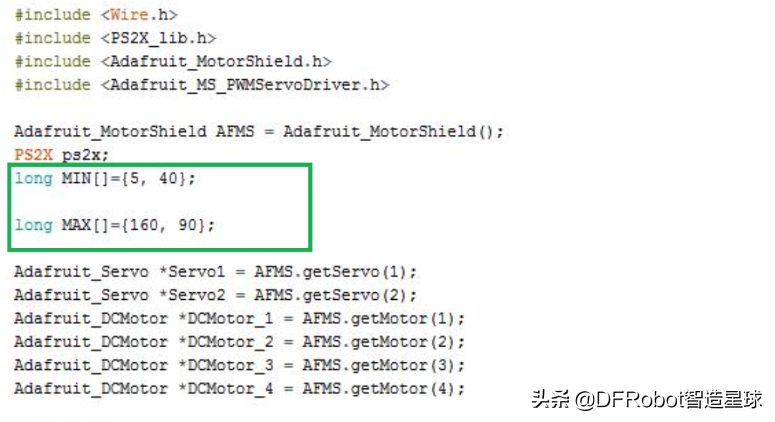
1、因为每个人的舵机装配角度不同,如果在硬件安装时没有很好地匹配舵机初始角度,无需拆开再组装,Maker-T教你改代码也能达到一样的效果。
2、需要修改以上六个数据即可完成舵机矫正。
3、各个数值的说明:
- 5代表炮台向右转的最大角度的角度数;
- 160代表炮台向左转的最大角度角度数;
- 40代表炮台下压的最大角度;
- 90代表炮台上抬的最大角度。大家可以尝试修改这四个值来让自己的云台能够旋转地很正确并且不会撞到其他零件。上下请务必调整到刚好不撞到下面的舵机,否则会造成侧面舵机堵转烧坏舵机;
- 70和60分别是开机时的舵机初始角度,根据大家设置的不同范围,设置一个中间值最妥。这样每次开机,炮口都会朝向正前方。
大家学会了么?
各位大神还可以在此代码上做修改,加入PID等调节能让战车性能更好。
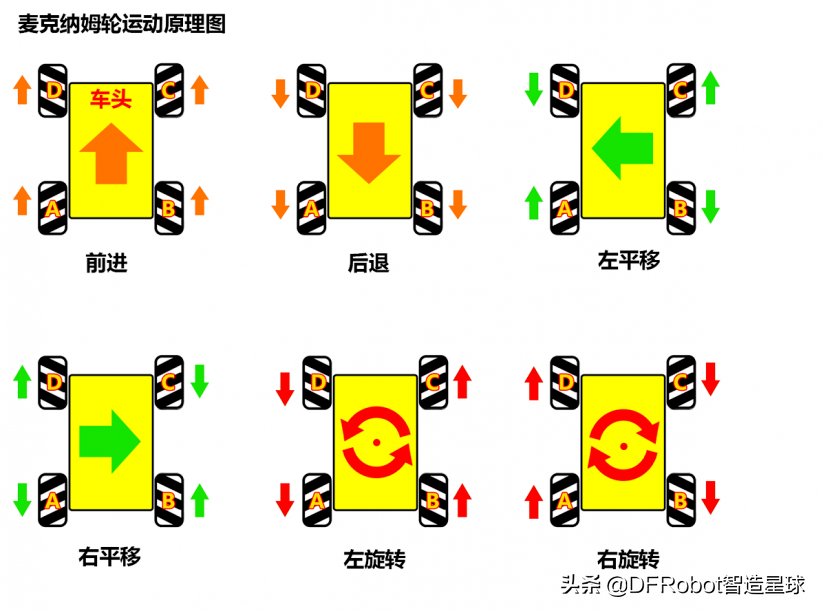
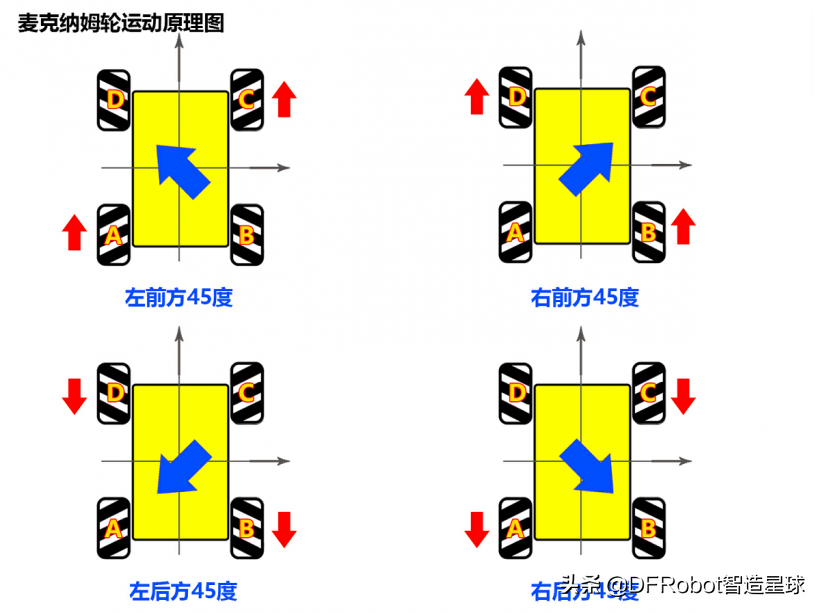
感谢@三好创客 提供的麦克纳姆轮运动原理图:
首发于DF创客社区:https://mc.dfrobot.com.cn/thread-308286-1-1.html
转载请注明出处与作者信息
文章提到的所有资料,可以到DF创客社区找到!


















 鲁公网安备37020202000738号
鲁公网安备37020202000738号