机器人科技的最新突破,令人惊叹!
发表时间: 2023-10-27 09:46
原创 | 文 BFT机器人

01
在系统适应性领域,埃因霍温科技大学的研究人员引入了一种方法,用于在移动机器人行为适应的背景下弥合应用开发人员和控制工程师之间的鸿沟。这种方法被称为“行为语义”,可以通过符号描述机器人的行为,并通过“语义地图”将它们翻译成控制动作。这一创新旨在简化自主移动机器人应用的运动控制编程,促进各种供应商控制软件之间的集成。通过在应用、交互和控制层之间建立结构化的交互层,以简化移动机器人应用的复杂性,潜在地提高地下探测和导航系统的效率。

移动平台的前视图
02
说到有用的机器人,普林斯顿大学已经开发出一款名为TidyBot的机器人,用于解决家务劳动。与简单的任务如搬动物品不同,真正的清理需要机器人能够区分物体、正确放置它们,并避免损坏它们。TidyBot通过结合物理灵活性、视觉识别和语言理解来实现这一目标。TidyBot配备了移动机械臂、视觉模型和语言模型,可以识别物体、将它们放置在指定位置,甚至以85%的准确率推断正确的操作。TidyBot的成功展示了它在处理复杂家庭任务方面的潜力。

工作中的TidyBot
03
将我们的关注转向水下环境,研究人员正在通过创新的自主机器人采矿车辆路径规划来解决深海采矿中面临的效率障碍。深海锰结核具有重要的潜力,因此这些机器人车辆对于它们的收集至关重要。通过改进路径规划方法,提高这些车辆在水下地形避开障碍物时的效率。这一发展有助于可持续利用海底的宝贵矿产资源。
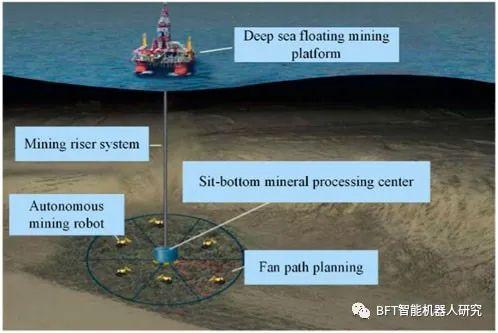
描述深海采矿系统操作框架的图示
04
在机器人运动领域,上海交通大学的研究人员最近开发了小尺度的软体机器人,具有卓越的灵巧性,能够在运动方向和形状重配置方面进行即时和可逆的变化。这些机器人由主动式介电弹性人工肌肉和独特的手性晶格足部设计驱动,可以通过单一电压输入在快速移动中改变方向。手性晶格足部通过调整电压频率生成各种运动行为,包括前进、后退和圆周运动。此外,将这种结构设计与形状记忆材料相结合,使机器人能够执行导航狭窄通道或形成特定轨迹等复杂任务。这一创新为下一代多功能运动软体机器人敞开了大门。
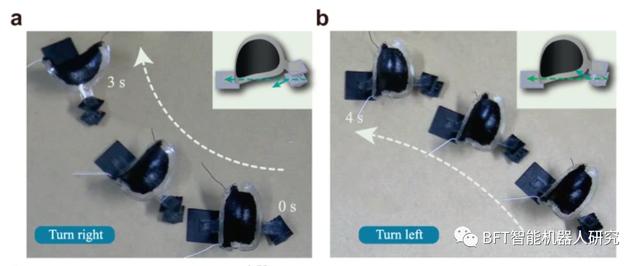
通过将晶格足部朝向相应的侧面,实现向右或向左的圆周运动
05
在医疗领域,斯坦福大学的研究人员与医生以及人工智能和机器人领域的业界领导者合作,展示了一种旨在与卢西尔·帕卡德儿童医院的小儿患者互动的新型机器狗,医院的患者有机会与这些机械宠物互动。这些名为Pupper的机器人是由本科工程学生开发的,并使用手持控制器操作,此次演示的目标是研究机器人与小儿患者之间的互动,探索提高临床体验和减轻患者焦虑的方法。

患者正在与机器狗玩耍
06
在改善健康方面,最近的一项试点研究探讨了在经颅磁刺激(TMS)治疗抑郁症中使用机器人的潜在好处。由Hyunsoo Shin领导的研究团队开发了一款定制的TMS机器人,旨在提高TMS线圈在大脑上的放置精度,这是有效治疗的关键因素。通过使用机器人系统,他们将准备时间缩短了53%,显著减少了线圈定位误差。该研究发现,机器人和手动TMS方法在减轻抑郁症严重程度和区域脑血流(rCBF)方面具有比较的治疗效果,为机器人辅助提高TMS治疗的精度和效率潜力带来了新视角。

治疗设施中的机器人重复经颅磁刺激(rTMS)配置,以及用于自动线圈定位的机器人定位设备
07
最后,在人机增强领域,来自多个机构的研究人员进行了一项研究,探讨了在人机互动中使用机器人眼睛作为预测线索的潜力。该研究旨在了解设计预测性机器人眼睛如何增强人与机器人之间的互动。研究测试了四种不同类型的眼睛设计,包括箭头、人眼和两种类人机器人眼睛设计。结果表明,抽象的类人机器人眼睛,模仿人类注意力的某些方面,最有效地引导了参与者的注意力并触发了自发的转移。这些发现表明,将抽象的类人眼睛纳入机器人设计中可以提高机器人运动的可预测性并增强人机互动。
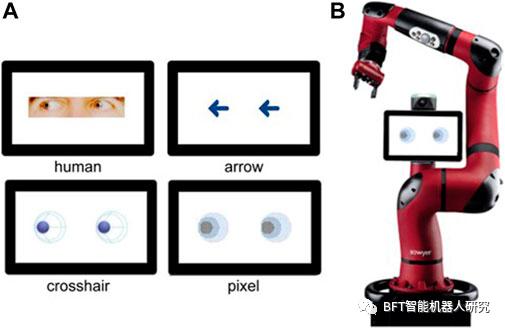
四种刺激类型:第一行展示了人类(左)和箭头(右)的刺激;第二行显示了抽象的类人机器人眼睛
作者 | LJH
排版 | 小河
审核 | 猫
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。如果想要了解更多的前沿资讯,记得点赞关注哦~
声明:本站内容部分源于网络转载,出于传递更多信息之目的,并不意味着赞同其观点或证实其描述。文章内容仅供参考,请咨询相关专业人士。
如果无意之中侵犯了您的版权,或有意见、反馈或投诉等情况, 请联系本站,[qq:]
Copyright ©2024 编程密语 All rights reserved 版权所有 鲁ICP备09004228号-12
 鲁公网安备37020202000738号
鲁公网安备37020202000738号