深度解析:C++20核心语言的即将到来的重大更新(二)
发表时间: 2020-01-13 10:39
选自modernescpp
作者:JP Tech等
机器之心编译
参与:Panda、杜伟
C++20(C++ 编程语言标准 2020 版)将是 C++ 语言一次非常重大的更新,将为这门语言引入大量新特性。C++ 开发者 Rainer Grimm 通过一系列博客文章介绍 C++20 的新特性。目前这个系列文章已经更新了两篇,本篇是第二篇,主要介绍了 C++20 的核心语言(包括一些新的运算符和指示符)。
C++20 的核心语言 之前的一篇博客概览式地介绍了 C++20 的概念、范围、协程和模块,下面开始介绍它的核心语言。
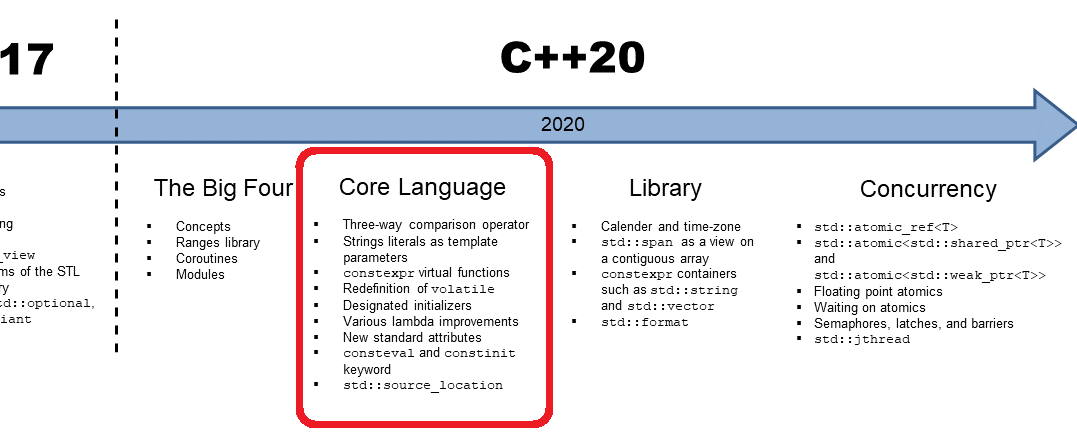
三路比较运算符 <=> 三路比较运算符 <=> 通常被称为太空船运算符。飞船运算符能确定两个值 A 和 B 谁大谁小或相等。 编译器可以自动生成三路比较运算符。你只需要用 default 礼貌地要求它即可。在这种情况下,你会得到所有六种比较运算符:==、!=、<、 <=、>、>=。
#include <compare>struct MyInt { int value; MyInt(int value): value{value} { } auto operator<=>(const MyInt&) const = default;};
默认的 <=> 执行的是字典顺序比较(lexicographical comparison),使用从基类开始从左到右并以声明顺序(declaration order)使用非静态元素的顺序。
微软的博客上有一些相当复杂精细的示例:
https://devblogs.microsoft.com/cppblog/simplify-your-code-with-rocket-science-c20s-spaceship-operator/
struct Basics { int i; char c; float f; double d; auto operator<=>(const Basics&) const = default;};struct Arrays { int ai[1]; char ac[2]; float af[3]; double ad[2][2]; auto operator<=>(const Arrays&) const = default;};struct Bases : Basics, Arrays { auto operator<=>(const Bases&) const = default;};int main() { constexpr Bases a = { { 0, 'c', 1.f, 1. }, { { 1 }, { 'a', 'b' }, { 1.f, 2.f, 3.f }, { { 1., 2. }, { 3., 4. } } } }; constexpr Bases b = { { 0, 'c', 1.f, 1. }, { { 1 }, { 'a', 'b' }, { 1.f, 2.f, 3.f }, { { 1., 2. }, { 3., 4. } } } }; static_assert(a == b); static_assert(!(a != b)); static_assert(!(a < b)); static_assert(a <= b); static_assert(!(a > b)); static_assert(a >= b);}
我认为,这个代码段中最复杂的部分不是太空船运算符,而是使用聚合初始化(aggregate initialisation)来实现 Base 的初始化。聚合初始化本质上意味着如果所有元素是公开的,那么你可以直接初始化类类型(class、struct 或 union)的元素。在这个案例中,你可以使用示例中那样的
braced-initialisation-list。好吧,这确实经过了简化,详见:
https://en.cppreference.com/w/cpp/language/aggregate_initialization 将字符串文字作为模板参数 在 C++20 之前,你不能将字符串用作非类型的模板参数。使用 C++20 时,你则可以这么做。我们可以在标准定义的 basic_fixed_string 中使用它们,其有一个 constexpr 构造函数。这个 constexpr 构造函数能在编译时实例化这个固定字符串。
template<std::basic_fixed_string T>class Foo { static constexpr char const* Name = T;public: void hello() const;};int main() { Foo<"Hello!"> foo; foo.hello();}
constexpr 虚拟函数
由于动态类型是未知的,所以无法在常量表达式(constant expression)中调用虚拟函数。这个限制将在 C++20 中被解除。
指定初始化器
我首先谈谈聚合初始化。下面是一个简单示例:
// aggregateInitialisation.cpp#include <iostream>struct Point2D{ int x; int y;};class Point3D{public: int x; int y; int z;};int main(){ std::cout << std::endl; Point2D point2D {1, 2}; Point3D point3D {1, 2, 3}; std::cout << "point2D: " << point2D.x << " " << point2D.y << std::endl; std::cout << "point3D: " << point3D.x << " " << point3D.y << " " << point3D.z << std::endl; std::cout << std::endl;}
我认为无需对这个程序进行解释。看看这个程序的输出:
显式总比隐式好。我们看看这是什么意思。程序
aggregateInitialisation.cpp 中的初始化非常容易出错,因为你可能写反这个构造函数的参数,而且你永远没法察觉。来自 C99 的指定初始化器就能在这里大显身手了。
// designatedInitializer.cpp#include <iostream>struct Point2D{ int x; int y;};class Point3D{public: int x; int y; int z;};int main(){ std::cout << std::endl; Point2D point2D {.x = 1, .y = 2}; // Point2D point2d {.y = 2, .x = 1}; // (1) error Point3D point3D {.x = 1, .y = 2, .z = 2}; // Point3D point3D {.x = 1, .z = 2} // (2) {1, 0, 2} std::cout << "point2D: " << point2D.x << " " << point2D.y << std::endl; std::cout << "point3D: " << point3D.x << " " << point3D.y << " " << point3D.z << std::endl; std::cout << std::endl;}
实例 Point2d 和 Point3D 的参数从名称就能看出来。这个程序的输出就等同于程序
aggregateInitialisation.cpp 的输出。带注释(1)和(2)的行很有意思。行(1)会报错,因为指定器的顺序与它们的声明顺序不匹配。在(3)行中,y 的指定器缺失了。在这个案例中,y 会被初始化为 0,比如使用
braces-initialisation-list {1, 0, 3}. 对 lambda 的各种改进 C++20 在 lambda 方面的改进也很多。 如果你想要了解改动的细节,请参阅 Bartek 的博客:
https://www.bfilipek.com/2019/02/lambdas-story-part1.html,里面介绍了 C++17 和 C++20 中的 lambda 改进。总之,我们会迎来两个有意思的变化。
struct Lambda { auto foo() { return [=] { std::cout << s << std::endl; }; } std::string s;};struct LambdaCpp20 { auto foo() { return [=, this] { std::cout << s << std::endl; }; } std::string s;};
在 C++20 中,通过在结构体 lambda 中复制而实现隐式 [=] capture 会出现弃用警告。如果你通过复制 [=, this] 来显式地获取它,就不会收到 C++20 的弃用警告。
你可能和我一样,最先想到的是:我们为什么需要模板 lambda?当你用 C++14 的 [](auto x){ return x; } 写一个通用 lambda 时,编译器会自动使用一个模板化的调用运算符来生成一个类:
template <typename T>T operator(T x) const { return x;}
有时候,你想要定义一个只对某个特定类型(如 std::vector)有效的 lambda。现在,模板 lambda 能帮我们做到这一点。你可以不使用类型参数,而是使用概念:
auto foo = []<typename T>(std::vector<T> const& vec) { // do vector specific stuff };
新属性:[[likely]] 和 [[unlikely]] C++20 有 [[likely]] 和 [[unlikely]] 两个新属性。这两个新属性都允许为优化器提供提示:执行的路径是更可能或是更不可能。
for(size_t i=0; i < v.size(); ++i){ if (unlikely(v[i] < 0)) sum -= sqrt(-v[i]); else sum += sqrt(v[i]);}
指示符 consteval 和 constinit 新的指示符 consteval 会创建一个即时函数。对于一个即时函数,每一次函数调用都必然产生一个编译时常量表达式。即时函数是隐式的 constexpr 函数。
consteval int sqr(int n) { return n*n;}constexpr int r = sqr(100); // OKint x = 100;int r2 = sqr(x); // Error
因为 x 不是常量表达式,所以最后的赋值会出错。因此,编译时不会执行 sqr(x)。 constinit 会确保有静态存储持续的变量在编译时被初始化。静态存储持续(static storage duration)的意思是对象会在程序开始时分配,在程序结束时又会重新分配。对于命名空间范围内声明的对象(全局对象),声明为 static 或 extern 的对象有静态存储持续。 std::source_location
C++11 有两个宏 __LINE__ 和 __FILE__ 来获取代码行和文件的信息。而在 C++20 中,类 source_location 能提供有关源代码的文件名、行号、列号和函数名信息。下面这个来自 cppreference.com的示例展示了第一种用途:
#include <iostream>#include <string_view>#include <source_location>void log(std::string_view message, const std::source_location& location = std::source_location::current()){ std::cout << "info:" << location.file_name() << ":" << location.line() << " " << message << '\n';}int main(){ log("Hello world!"); // info:main.cpp:15 Hello world!}声明:本站内容部分源于网络转载,出于传递更多信息之目的,并不意味着赞同其观点或证实其描述。文章内容仅供参考,请咨询相关专业人士。
如果无意之中侵犯了您的版权,或有意见、反馈或投诉等情况, 请联系本站,[qq:]
Copyright ©2025 编程密语 All rights reserved 版权所有 鲁ICP备09004228号-12
 鲁公网安备37020202000738号
鲁公网安备37020202000738号