探索PLC与PC网络通信的实验过程
发表时间: 2019-07-30 15:38
因项目需要PLC与PC连接,传输一些状态和控制信息。为了最快的响应速度,保险的方式是采用I/O直接连接。但这需要额外增加I/O卡,而且和PLC的I/O功能有些重复。那么,网络通信是否可行呢?本文将进行一些实验。

西门子S7-1200
使用的PLC是目前主流的西门子S7-1200. 它支持的网络标准/协议很多,比如PROFINET, PROFIBUS等,还可以间接连接Modbus设备。每个标准下都有很多服务/协议,详情可以参考Communication with SIMATIC 。但这些标准有些是用于西门子的设备互联的,不一定适用于PC。
下图是 TIA Portal V14 中通信相关的指令,也可以作为线索。
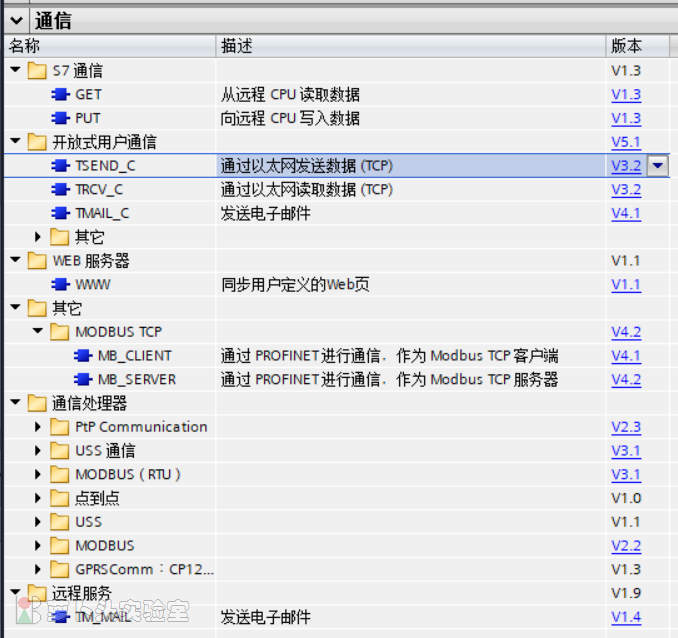
PLC通信指令
和PC的通信,一种方式是使用OPC server,但它是基于OLE/COM的,只能用于Windows。有些软件比如LabView提供了和西门子PLC通信的支持。跨平台的开源的方案,有一个是Snap7。我们可以先试试这个。另外可以尝试最原始的TCP协议。
Snap7是针对西门子S7协议的。PLC不需任何配置就是S7的server,而我们只需要利用Snap7 lib,就可以让PC作为S7 client,读/写服务器端的数据块。
数据块分为输入区(DI, AI),输出区(DQ, AQ),程序数据块(DB)等等。下图中,DB3是测试程序的数据块。
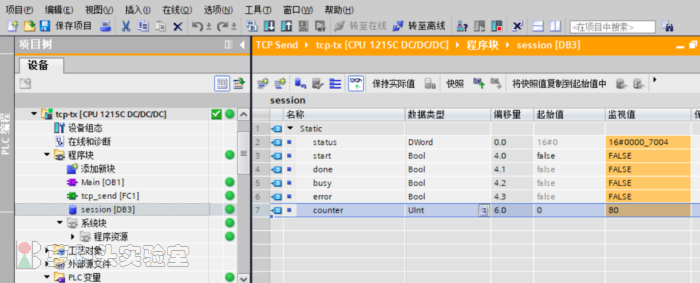
数据块及监测值
用Snap7包中自带的(编译好的)测试程序可以查看/修改它的值。
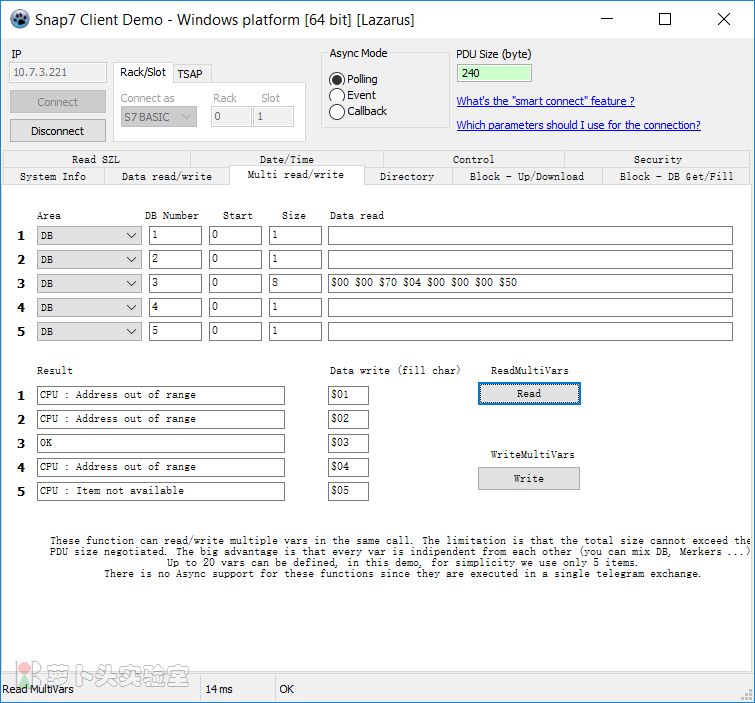
Snap7测试程序
在读写前需要进行配置和权限的设置:禁用块优化,给予完全访问权限,详见 Snap7的文档。
还有一个文档中没提到的设置:允许来自远程对象的PUT/GET通信访问。否则会出现 “Function not available”,
“function refused by CPU”之类的错误。
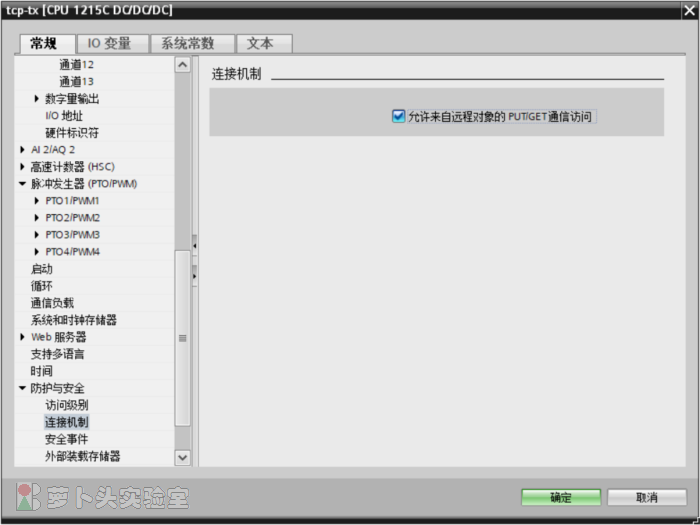
Snap7通信的访问设置
有时使用脚本语言会更方便一些。python-snap7就是一个Snap7 lib的Python封装。因为只是接口层的封装,对速度的影响很小。
安装时需要先安装Snap7的库,再用pip安装python-snap7。有些平台没有现成的Snap7的库,需要自己编译。反正树莓派上我是自己编译的。 实测Python2和Python3都可以工作。
核心调用代码如下。因为I/O只有两字节,就直接读/写两字节了。
import snap7from snap7.snap7types import S7AreaDB, S7AreaPA, S7AreaPEclass S7Client: def __init__(self, ip, slot=1, rack=0): self.client = snap7.client.Client() self.client.connect(ip, rack, slot) def readDI(self): area = S7AreaPE db = 0 start = 0 amount = 2 ba = self.client.read_area(area, db, start, amount) d = ba[1] d <<= 8 d |= ba[0] return d def writeDQ(self, data): area = S7AreaPA db = 0 start = 0 amount = 2 ba = bytearray(amount) ba[0] = data & 0xff ba[1] = data >> 8 self.client.write_area(area, db, start, ba)
循环读/写DQ,看看总耗时。示意代码如下:
def testWriteLoop(self, count): d = 0 self.log.info("Write DQ from: %04x", d) t1 = time.time() while d < count: self.plc.writeDQ(d) d += 1 t2 = time.time() self.log.info("Write DQ till: %04x. Average: %.2fms", (d - 1), (t2 - t1) * 1000 / d)可以看到单次读/写的平均时间略高于9ms.
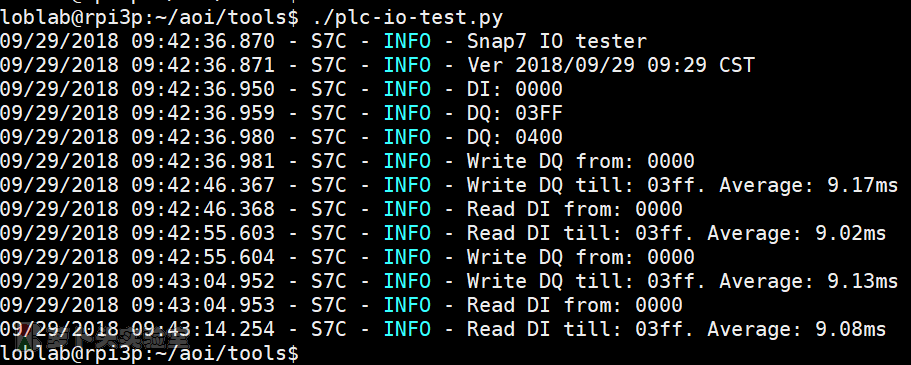
读写测试结果
下图是最低位的波形。10个周期对应于20次写,耗时约182ms。高低电平不对称的问题后面再说。
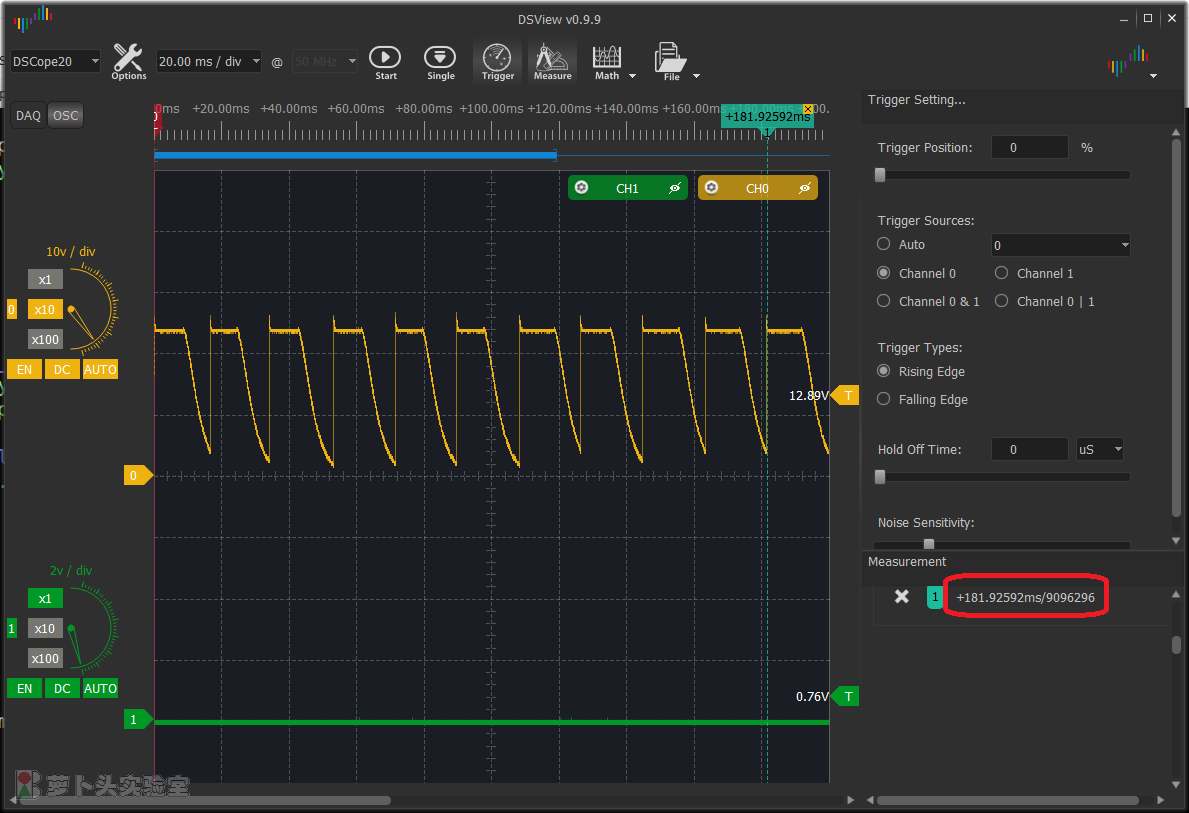
递增写DQ时DQ0.0的波形
如果PC做Snap7的服务器,则PLC需要使用GET/PUT指令读/写PC端的数据。既然都是S7协议,我们假设它的速度和正向是相当的,暂且跳过,先试试另一类型的通信。
S7-1200支持开放式用户通信,即基于TCP,但不属于任何标准应用层协议的,完全由用户自己定义的协议。
实验设计

实验器材及连线
PC端作为服务器,监听某一端口。在Linux上,可以用命令行工具netcat进行调试。
开两个窗口:
一个窗口输入字符,另一个窗口就会显示出来。
然后,用Python socket写一个类似的服务器端程序,核心代码如下:
import socket self.sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM) self.sock.bind(('', self.args.port)) self.sock.listen(1) self.conn, addr = self.sock.accept() data = self.conn.recv(32) self.log.info("Received: %02X %02X", data[0], data[1])可以用 netcat 测试这个服务器程序。
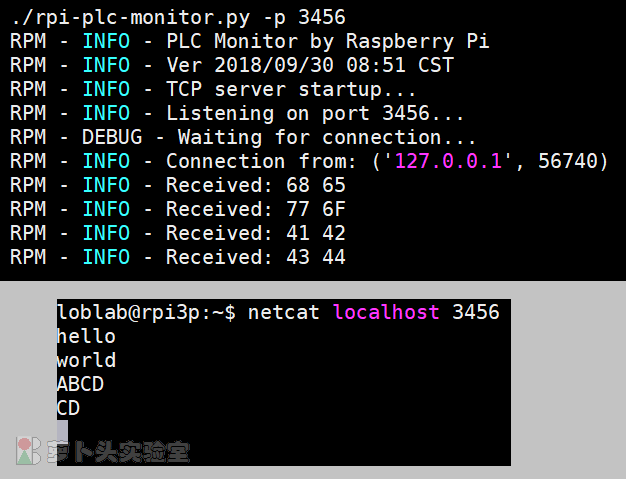
PC端的TCP server
PLC端使用TSEND_C发送数据。
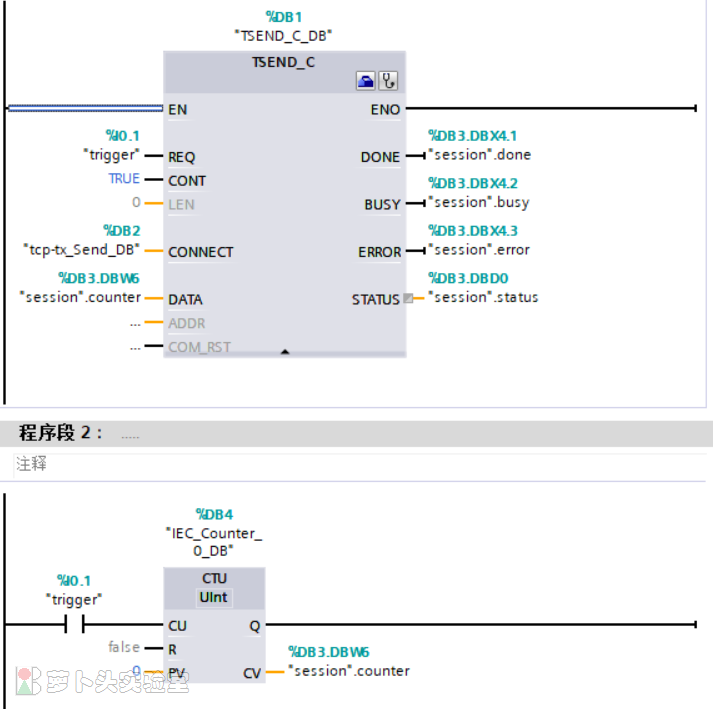
PLC端程序
在网络连接设置中指定PC端的IP地址和端口号,端口号要和服务器监听的端口号一致。由PLC主动发起连接。
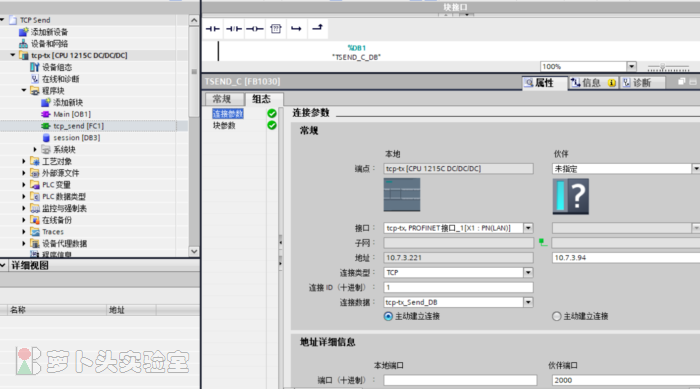
PLC端网络连接设置
下图中,黄色为PLC端的输入(信号1),绿色为树莓派上收到数据后的输出(信号2)。
都以上升沿作为标志。两者的时间差不到9ms。
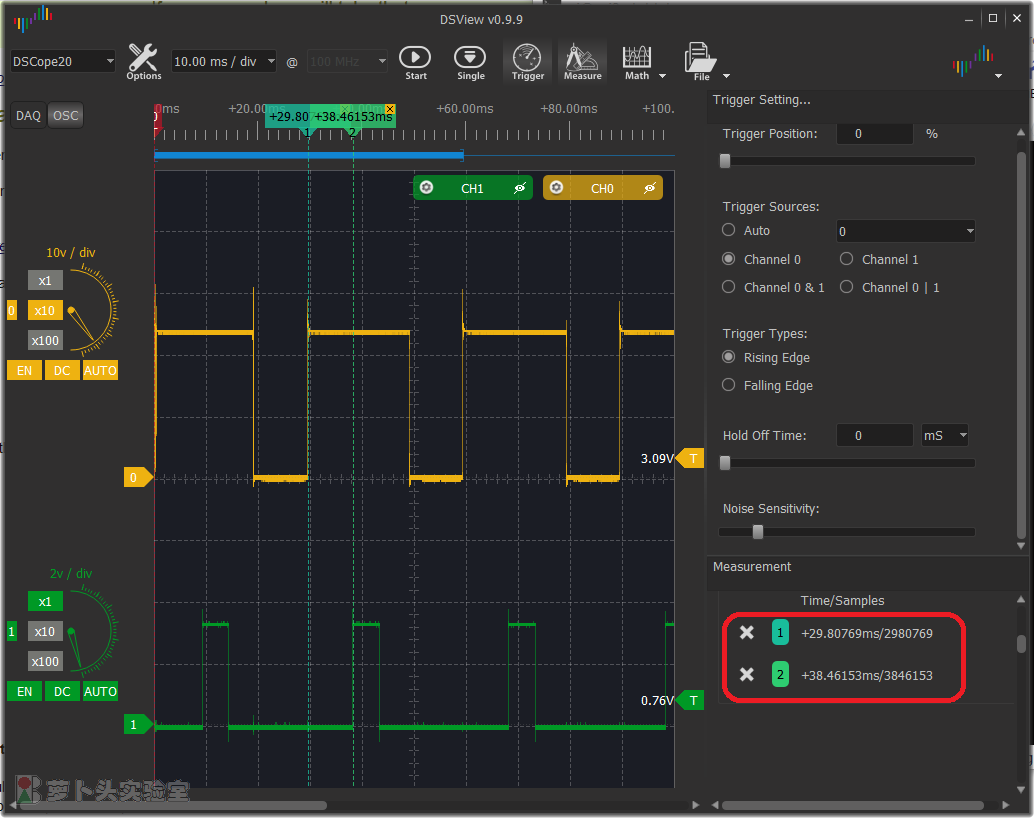
通信耗时的波形图
由通信引起的循环负荷:默认是20%,取值可以从15%到50%。改变这个值,发现对通信时间并没有影响。
这个值默认是6.4ms,它是用来过滤按键抖动的。但对于电路触发(非人工/机械按键)的情况,这个抖动可以设得很小。
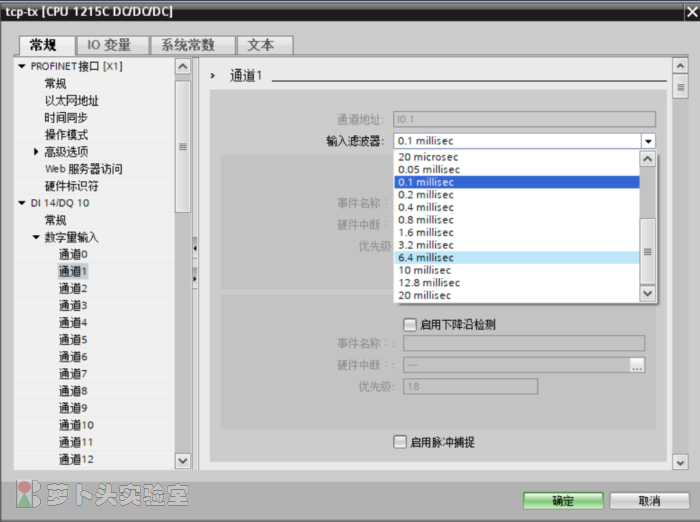
PLC输入滤波器
将它调小至0.1ms,整个耗时降低了约6ms. 通信耗时不到3ms了。

通信耗时(0.1ms输入滤波)
PLC的运行方式是不断循环去读取输入,执行程序块,更新输出的模式。循环周期过长,是否会影响网络通信呢?
通过在线诊断,可以看到循环时间最长为4ms,通常都在1~2ms。
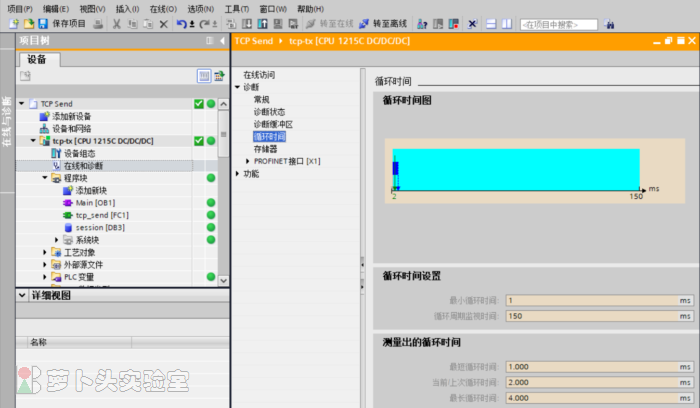
PLC循环时间
这说明循环时间并不是瓶颈。而且反过来,循环时间比通信时间还短(即使输入滤波器为6.4ms,通信时间9ms时,循环时间依然是1~2ms),这说明通信和循环似乎是分头执行的。
本来还想试一下中断执行方式的,但把通信程序块放到中断响应里执行并没有成功。考虑到对于PLC的百兆网口,3ms已经够快了,就没再折腾了。
还试验了一下,在PLC上单纯地增加一个计数器或反复翻转输出电平,每次操作耗时大约也是3ms。
顺便说一句,在PLC的数字输出上,却看不到电平的翻转(看到的总是高电平)。前面有一张“递增写DQ时DQ0.0的波形”图,18ms的周期,基本上已看不到电平下降到0了。感觉PLC的输出频率并不高,甚至可能有高频滤波。
从PLC的众多网络通信方式中,本文试验了简单易行并且跨平台的两种方式,用来和PC通信。
考虑到S7-1200只是百兆网络,这个速度应该是不错的,可以满足大部分需要。
声明:本站内容部分源于网络转载,出于传递更多信息之目的,并不意味着赞同其观点或证实其描述。文章内容仅供参考,请咨询相关专业人士。
如果无意之中侵犯了您的版权,或有意见、反馈或投诉等情况, 请联系本站,[qq:]
Copyright ©2025 编程密语 All rights reserved 版权所有 鲁ICP备09004228号-12
 鲁公网安备37020202000738号
鲁公网安备37020202000738号